Wichtigste Erkenntnisse
- Beginnen Sie die Auswahl des Lösers bei der Fragestellung der Studie und passen Sie die Methode dann an die Zeitskalen und die Detailgenauigkeit der Wellenform an, von denen die Antwort abhängt.
- Behandeln Sie den Zeitschritt, die Wahl des Integrators und die Toleranzen als Modellierungsparameter, da diese direkt die numerische Dämpfung, die Stabilität und die in den Ergebnissen erhaltenen Merkmale beeinflussen.
- Schaffen Sie Vertrauen durch eine konsequente Validierung, einschließlich einheitlicher Anfangsbedingungen, Überprüfungen der physikalischen Grenzwerte und einer Sensitivitätsanalyse mit kurzen Zeitschritten, bevor Sie das Verhalten von Wandlern oder Schutzvorrichtungen interpretieren.
Die Wahl des richtigen Solvers ist entscheidend, um Ergebnisse für Stromversorgungssysteme zu erhalten, auf die Sie sich verlassen können.
Die Wahl des Solvers ist keine Frage der Softwarepräferenz, sondern eine Modellierungsentscheidung, die darüber entscheidet, welche physikalischen Phänomene Ihre Simulation abbilden kann und welche nicht. Ein übersichtliches Diagramm kann dennoch falsch sein, wenn die Methode die relevanten Zeitskalen nicht abbilden kann oder wenn numerische Dämpfung das Verhalten verdeckt, das Sie eigentlich untersuchen müssen. Ein für Isolationsprüfungen üblicher Blitzimpuls hat eine Dauer von 1,2/50 µs, und allein diese Tatsache sollte einen Punkt frühzeitig klären: Manche elektrischen Fragestellungen spielen sich im Mikrosekundenbereich ab, nicht im Sekundenbereich.
„Die richtige Wahl des Solvers beginnt mit dem Ziel Ihrer Untersuchung; von dort aus geht man rückwärts vor, um die Modelldetails, den Zeitschritt und die numerische Methode festzulegen, die dort Genauigkeit gewährleisten, wo es darauf ankommt.“
Geschwindigkeit ist wichtig, steht jedoch hinter der Korrektheit, denn eine schnellere, aber falsche Antwort kostet Sie dennoch Zeit, wenn Tests nicht übereinstimmen, Schutzmechanismen in der Theorie versagen oder Steuerungen nur deshalb stabil erscheinen, weil der Solver die Dynamik verschleiert hat. Behandeln Sie den Solver und seine Einstellungen als Teil Ihres Modells, dokumentieren Sie sie, und Sie werden Ergebnisse erhalten, die einer Überprüfung standhalten.
Definition gängiger Solver für Stromversorgungssysteme, die in elektrotechnischen Untersuchungen verwendet werden
Stromnetz-Löser lassen sich in einige wenige Gruppen einteilen, die die physikalischen Vorgänge jeweils auf unterschiedliche Weise vereinfachen. Algebraische Löser berechnen den stationären Stromfluss und Kurzschlussbedingungen ohne zeitliche Schrittweise. Phasor- und RMS-Löser im Zeitbereich simulieren die elektromechanische Dynamik anhand des gemittelten Netzverhaltens. EMT-Löser simulieren die vollständigen elektrischen Wellenformen, sodass Schaltvorgänge, Sättigungseffekte und schnelle Schutzreaktionen direkt sichtbar werden.
Diese Familien unterscheiden sich zudem darin, wie sie Gleichungen bei jedem Zeitschritt lösen. Der Power-Flow-Ansatz nutzt in der Regel eine Iteration nach Newton für algebraische Gleichungen, während EMT- und RMS-Löser differentielle algebraische Gleichungen integrieren, die Netzwerkanforderungen mit der Dynamik der Komponenten verbinden. Der EMT-Ansatz mit festem Zeitschritt konzentriert sich auf die Wiederholbarkeit der Wellenformgenauigkeit, während der RMS-Ansatz mit variablem Zeitschritt häufig auf lange Laufzeiten mit akzeptablem dynamischen Fehler ausgerichtet ist. Solver-Bezeichnungen wie „explizit“, „implizit“, „trapezförmig“ und „rückwärts-Euler“ beschreiben, wie sich der Integrator verhält, wenn im System schnelle und langsame Dynamiken miteinander vermischt sind.
Ein praktischer Ansatz, um den Überblick zu behalten, besteht darin, sich zu fragen, was die Zustände Ihres Modells tatsächlich darstellen. RMS- und Phasormodelle geben in der Regel die Amplituden und Winkel der Grundfrequenz wieder, sodass sie keine PWM-Welligkeit oder Subzyklus-Spitzen anzeigen, die bestimmte Schutzvorrichtungen auslösen. EMT-Modelle stellen Momentanspannungen und -ströme dar, weshalb sie Kommutierungsüberlappungen, Diodenrücklaufeffekte und Wellenausbreitungseffekte erfassen, wenn Details der Leitung eine Rolle spielen. Sobald Sie die Solver-Familie ausgewählt haben, handelt es sich bei dem Rest der Einrichtung nicht um „Feinabstimmung“, sondern um die Anpassung der numerischen Werte an die von Ihnen gewählte physikalische Darstellung.
Die Studienziele mit der EMT- und der Phasor-Domänen-Simulation abgleichen
Die EMT-Simulation ist die richtige Wahl, wenn das Ergebnis von Details der Wellenform, schnellen Schaltvorgängen oder Wechselwirkungen zwischen dem Netz und den Geräten im Subzyklusbereich abhängt. Die Phasor- und RMS-Simulation ist die richtige Wahl, wenn das Ergebnis von langsameren Dynamiken, Grenzwerten im stationären Zustand oder dem Verhalten auf Systemebene über viele Zyklen hinweg abhängt. Die von Ihnen gewählte Methode legt eine Obergrenze für das schnellste Phänomen fest, auf das Sie sich verlassen können. Diese Obergrenze ist wichtiger als die Laufzeit.
Eine konkrete Methode zur Auswahl besteht darin, die Frage so zu formulieren: „Was muss zeitlich aufgelöst werden, um diese Frage zu beantworten?“ Betrachten wir eine 13,8-kV-Industriezuleitung mit einem Frequenzumrichter-Frontend, einer Kondensatorbank und einem Überstromrelais, die in der Nähe einer empfindlichen Prozesslast installiert ist. Wenn Sie Kondensator-Einschaltspitzen, Kommutierungskerben der Diodenbrücke und das Ansprechen des Relais bei einem verzerrten Strom erkennen müssen, ist die EMT die einzige Methode, die diese Details ohne weitreichende Annahmen aufzeigt. Wenn Sie lediglich den Verlauf der Spannungswiederherstellung über einige zehn Sekunden nach einem Motor-Neustart benötigen, liefert eine Phasor- oder RMS-Analyse schneller Ergebnisse mit weniger Modelldetails.
| Was Sie lernen müssen | Eine Methode, die in der Regel gut passt | Was hat den größten Einfluss auf die Genauigkeit? |
| Gleichspannungen, Verluste und Anlagenauslastung | Leistungsfluss mit einem algebraischen Netzwerklöser | Die Qualität der Modelldaten und konsistente Basiswerte sind wichtiger als die Solver-Einstellungen |
| Winkel- und Frequenzgang des Generators im Sekundentakt | Elektromechanische Simulation von Phasor- oder Effektivwerten | Modelle für Maschinen, Regler und Erreger sowie die zeitliche Abfolge der Ereignisse werden die Ergebnisse bestimmen |
| Wechselwirkungen bei der Umrichtersteuerung und damit verbundene Verzerrungen | EMT-Zeitbereichssimulation | Zeitschritt, Details des Schaltmodells und die Abtastrate der Regelung bestimmen, worauf Sie sich verlassen können |
| Empfindlichkeitsanpassung in Abhängigkeit von Subzyklus-Spitzen oder Verzerrung | EMT- oder wellenformbasierte Schutzmodellierung | Anti-Aliasing-Filterung, Messfenster und die Stabilität der Integrationsmethode spielen eine Rolle |
| Lange Versorgungsspannungsprofile bei zahlreichen Lastwechseln | Quasi-statische Zeitreihen unter Verwendung von stationären Lösungen | Im Vordergrund stehen Lastmodelle, Schaltlogik und Ereignisabläufe, nicht Details im Mikrosekundenbereich |
| Wanderwellen und Stoßausbreitung entlang langer Leiter | EMT mit verteilter Leitungsdarstellung | Die Ausbreitungseffekte skalieren mit der Lichtgeschwindigkeit von 299.792.458 m/s, daher muss die Zeitauflösung diese Verzögerungen berücksichtigen |
Sobald das Ziel klar ist, lassen sich gemischte Arbeitsabläufe leichter handhaben. Beginnen Sie mit einer einfacheren Methode, um die Anfangsbedingungen festzulegen und die Betriebspunkte auf Plausibilität zu prüfen, und wechseln Sie dann nur dort zur EMT, wo es die Physik erfordert. Ein Solver gleicht fehlende Modelldetails nicht aus, und zusätzliche Details helfen einem Solver nicht weiter, der das Verhalten, auf dem Ihre Fragestellung beruht, nicht abbilden kann. Wählen Sie die Methode, die zur Fragestellung passt, und legen Sie dann die numerischen Parameter so fest, dass diese Wahl abgesichert ist.
Verwenden Sie die Einstellungen für Zeitschritt und Integration, um die Genauigkeit zu steuern
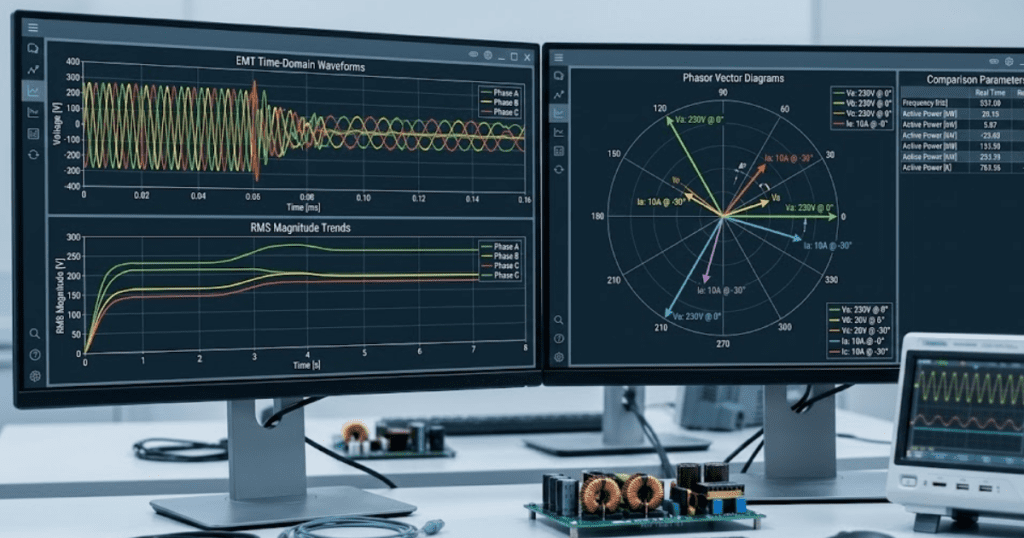
Zeitschritt und Integrationsmethode beeinflussen numerische Fehler, die numerische Dämpfung und die Stabilität und bestimmen somit unmittelbar, was Sie aus einem Diagramm ableiten. Ein zu großer Zeitschritt glättet Spitzenwerte und verzerrt die Phase, selbst wenn die Simulation „einwandfrei läuft“. Eine Methode mit zu starker Dämpfung verdeckt Schwingungen, die für die Regelung oder den Schutz von Bedeutung sind. Die richtigen Einstellungen ergeben sich aus der schnellsten Dynamik, die Sie abbilden müssen, und nicht aus den Standardeinstellungen.
Bei der EMT mit festem Zeitschritt erzielt man in der Regel die besten Ergebnisse, wenn man den Zeitschritt so wählt, dass er der Schaltfrequenz, den kleinsten Zeitkonstanten von L und C sowie der schnellsten Abtastrate im Modell entspricht. Eine gängige technische Überprüfung besteht darin, genügend Punkte pro Schaltperiode beizubehalten, damit die Schaltflanken nicht auf ein oder zwei Abtastwerte zusammengefasst werden, und anschließend sicherzustellen, dass sich die wichtigsten Größen nicht wesentlich ändern, wenn man den Zeitschritt halbiert. Die trapezförmige Integration bewahrt die Details der Wellenform gut, kann jedoch numerisches Schwingen zeigen, wenn die Unstetigkeiten stark ausgeprägt sind. Die Rückwärts-Euler-Methode dämpft hochfrequente Anteile, was der Stabilität zuträglich sein kann, aber auch genau die Welligkeit verbergen kann, die Sie eigentlich sehen wollten.
- Legen Sie einen maximalen Zeitschritt fest, der an Ihre schnellste physikalische Zeitkonstante gekoppelt ist
- Vergleichen Sie die Wahl des Integrators mit Ihren Anforderungen hinsichtlich Welligkeitsauflösung und Dämpfung
- Die Abtastzeiten des Controllers an den Simulationsschritt anpassen, um eine Zeitabweichung zu vermeiden
- Stellen Sie die Toleranzen des nichtlinearen Lösers so ein, dass Ströme und Spannungen eng konvergieren
- Führen Sie eine kurze Simulation mit einem kleineren Schritt durch, um zu überprüfen, ob die wichtigsten Ergebnisse bestehen bleiben
Genauigkeitsprobleme wirken oft wie „seltsame physikalische Phänomene“, doch die Ursache ist numerischer Natur. Spitzenwerte im Moment des Umschaltens können Artefakte des Zeitschritts sein, während ein fehlendes Überschwingen auf numerische Dämpfung zurückzuführen sein kann. Auch die Ereignisbehandlung spielt eine Rolle, da Schaltervorgänge und die Aktivierung von Begrenzern Diskontinuitäten verursachen können, die den Integrator belasten. Wenn Sie den Zeitschritt als Modellierungsparameter und nicht als Regler für die Leistungsfähigkeit betrachten, vermeiden Sie langwierige Versuchs- und Irrtum-Zyklen.
Behandeln Sie komplexe Netzwerke und nichtlineare Geräte ohne Konvergenzprobleme
In Systemen mit hoher Steifigkeit vermischen sich sehr schnelle und sehr langsame Dynamiken, was dazu führen kann, dass explizite Methoden instabil werden oder unpraktisch kleine Schritte erzwingen. Nichtlineare Komponenten erfordern iterative Lösungen innerhalb jedes Schritts, sodass Konvergenzeinstellungen nicht nur dazu dienen, Warnungen zu unterbinden, sondern auch Einfluss auf die Genauigkeit haben. Ideale Schalter, gesättigte magnetische Komponenten und harte Grenzwerte verursachen Diskontinuitäten, die die Iterationen erschweren. Stabile Ergebnisse lassen sich nur mit einem Solver erzielen, der der Steifigkeit des Modells entspricht, sowie mit einem Modell, das unrealistische Idealisierungen vermeidet.
Praktische Lösungen setzen in der Regel bei den Gerätemodellen an. Parasitäre Widerstände, Snubber und realistische Quellenimpedanzen beseitigen unendliche Di- oder dv-Anforderungen, die keine numerische Methode erfüllen kann. Sanftere Begrenzungsfunktionen verhalten sich oft besser als hartes Clipping, da sie plötzliche Änderungen der Jacobi-Matrix während der Newton-Iterationen reduzieren. Auch konsistente Anfangsbedingungen spielen eine Rolle, denn ein Solver, der weit entfernt von einem zulässigen Betriebspunkt startet, verschwendet Iterationen und kann in unphysikalischen Zuständen landen.
Die Transparenz des Tools ist hier hilfreich, da man sehen kann, welche Gleichung tatsächlich versagt, wenn die Konvergenz abbricht. Aus diesem Grund wird SPS SOFTWARE häufig in Lehre und Forschung eingesetzt, da bearbeitbare Komponentenmodelle es erleichtern, zu erkennen, wo eine „ideale“ Annahme zu einer Versteifung geführt hat oder wo ein Begrenzer eine algebraische Schleife verursacht hat. Sobald das Modell physikalisch plausibel ist, erfüllen implizite Integration und sinnvolle Toleranzen ihren Zweck.
„Eine erfolgreiche Konvergenz ist kein Zufall, sondern das Ergebnis von Modellrealismus und numerischer Abstimmung.“
Überprüfen Sie die Ergebnisse anhand von Anfangsbedingungen, Grenzwerten und Plausibilitätsprüfungen
Die Validierung ist der Schritt, der sicherstellt, dass Ihre Wahl des Solvers keinen Modellierungsfehler verdeckt hat. Die Anfangsbedingungen müssen mit dem von Ihnen angestrebten stationären Zustand übereinstimmen, da die Simulation sonst ihre ersten Zyklen damit verbringt, eine Diskrepanz zu korrigieren, die Sie gar nicht untersuchen wollten. Physikalische Grenzen müssen eingehalten werden, wie beispielsweise die Kontinuität der Kondensatorspannung und des Induktorstroms über Schaltvorgänge hinweg. Grundlegende Plausibilitätsprüfungen decken Einheitenfehler, Vorzeichenfehler und unmögliche Sollwerte auf, bevor Sie tiefergehenden Erkenntnissen Vertrauen schenken.
Beginnen Sie mit den einfachsten Überprüfungen, für die kein weiteres Werkzeug erforderlich ist. Vergewissern Sie sich, dass Spannungen und Ströme im stationären Zustand den erwarteten Werten entsprechen, dass die Leistungsbilanzen plausibel sind und dass die Zustände der Bauteile mit der Steuerlogik übereinstimmen. Überprüfen Sie, ob die Schutzelemente dieselben Messwerte erhalten, die Sie modelliert haben, einschließlich etwaiger Filter und Messfenster. Ein kurzer Lauf mit reduziertem Zeitschritt ist ebenfalls eine aussagekräftige Überprüfung, da große Abweichungen auf numerische Empfindlichkeit hindeuten, die Sie beheben müssen, bevor Sie feine Details interpretieren.
Grenzwerte und Invarianten sorgen für zusätzliche Sicherheit. Die Sättigung sollte den Fluss oder Strom dort begrenzen, wo es das Modell vorsieht, und nicht dort, wo der Integrator es zulässt. Die in Induktoren und Kondensatoren gespeicherte Energie sollte ohne Quelle nicht ansteigen, und Dämpfung sollte nicht aus dem Nichts auftreten. Bei einer konsequenten Validierung wird die Wahl des Lösers zu einer kontrollierten technischen Variable und nicht zu einer versteckten Quelle von Unsicherheit.
Vermeiden Sie häufige Fehler bei der Auswahl von Lösern in Umrichtern und Schutzauslegungsstudien
Die meisten Fehler bei der Solver-Anwendung entstehen dadurch, dass eine Frage zur Wellenform mit einer Methode behandelt wird, die nicht auf Wellenformen basiert, oder dass eine EMT-Methode mit Einstellungen verwendet wird, die das gewünschte Verhalten nicht abbilden können. Konvertermodelle verstärken dieses Problem noch, da Schaltvorgänge, Kontrollabtastungen und nichtlineare Grenzwerte zeitlich dicht beieinander liegen. Schutzmodelle verstärken es noch einmal, da die Erfassung und das Timing von Spitzenwerten, Verzerrungen und Messfenstern abhängen können. Sie erzielen bessere Ergebnisse, wenn Sie die Solver-Einstellungen als Teil des Schutz- oder Wandlerdesigns betrachten und nicht als nachträglichen Einfall.
Phasor-Analysen scheitern bei Umrichter- und Schutzanwendungen häufig, wenn wichtige Auslösebedingungen von Verzerrungen, Gleichstrom-Offsets oder subzyklischen Merkmalen abhängen. EMT-Analysen scheitern, wenn der Zeitschritt zu groß ist, wenn der Integrator eine Dämpfung hinzufügt, die Welligkeit verdeckt, oder wenn ideale Bauteilmodelle Diskontinuitäten erzeugen, die Konvergenzabkürzungen erzwingen. Ein weiteres häufiges Problem ist die Kombination von diskreter Logik mit einem variablen Zeitschritt ohne Überprüfung des Ereigniszeitpunkts, da eine Zeitabweichung den Relaisbetrieb oder Änderungen des Steuerungszustands verschieben kann. Eine klare Abstimmung zwischen Abtast-, Schalt- und Integrationszeitpunkten verhindert, dass sich solche Fehler einschleichen.
Die beste langfristige Vorgehensweise besteht darin, zunächst aufzuschreiben, was gelöst werden muss, und dann die einfachste Methode zu wählen, mit der sich das Problem dennoch sauber lösen lässt. Ein kurzer Testlauf, bei dem Konvergenz, Zeitschrittsensitivität und Messverhalten überprüft werden, spart mehr Zeit, als sich spät im Projekt mit „seltsamen“ Diagrammen herumzuschlagen. Teams, die mit SPS SOFTWARE arbeiten, formalisieren dies oft als Teil ihrer Modellkonfiguration, da transparente Gleichungen und editierbare Modelle die Annahmen des Solvers sichtbar und überprüfbar machen. Diese Disziplin ist es, mehr als jede einzelne Solver-Einstellung, die die Simulation von einem schönen Bild in einen technischen Nachweis verwandelt.