Principaux enseignements
- Commencez par choisir le solveur en fonction de la question posée dans l'étude, puis adaptez la méthode aux échelles de temps et au niveau de détail de la forme d'onde dont dépend la réponse.
- Considérez le pas de temps, le choix de l'intégrateur et les tolérances comme des paramètres de modélisation, car ils déterminent directement l'amortissement numérique, la stabilité et les caractéristiques qui apparaissent dans les résultats.
- Instaurez la confiance grâce à une validation rigoureuse, comprenant notamment des conditions initiales cohérentes, des vérifications des limites physiques et une analyse de sensibilité avec un pas de temps court avant d'interpréter le comportement du convertisseur ou du dispositif de protection.
C'est en choisissant le bon solveur que vous obtiendrez des résultats fiables pour votre réseau électrique.
Le choix du solveur n'est pas une simple préférence logicielle, mais un choix de modélisation qui détermine les phénomènes physiques que votre simulation peut ou ne peut pas représenter. Un graphique clair peut tout de même être erroné si la méthode ne permet pas de rendre compte des échelles de temps pertinentes, ou si l'amortissement numérique masque le comportement que vous devez réellement étudier. Une impulsion de foudre standard utilisée pour les essais d'isolation est de 1,2/50 µs, et ce simple fait devrait permettre de clarifier d'emblée un point : certaines questions électriques se jouent à l'échelle des microsecondes, et non des secondes.
« Pour bien choisir un solveur, il faut commencer par définir l'objectif de l'étude, puis remonter en amont pour déterminer les détails du modèle, le pas de temps et la méthode numérique qui garantiront la précision là où cela compte. »
La rapidité a son importance, mais elle passe après l'exactitude, car une réponse erronée donnée plus rapidement vous fait tout de même perdre du temps lorsque les tests ne concordent pas, que les mécanismes de protection ne fonctionnent pas correctement sur le papier ou que les contrôles ne semblent stables que parce que le solveur a masqué la dynamique. Considérez le solveur et ses paramètres comme faisant partie intégrante de votre modèle, documentez-les, et vous obtiendrez des résultats qui résisteront à un examen approfondi.
Définir les solveurs courants utilisés dans les études électriques
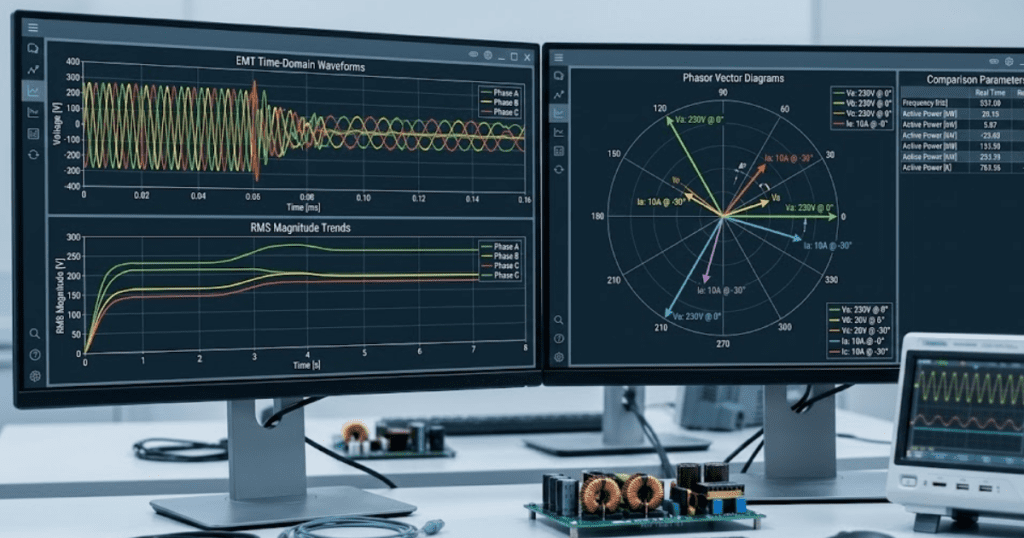
Les solveurs de réseaux électriques se répartissent en plusieurs familles, chacune simplifiant la physique à sa manière. Les solveurs algébriques traitent les calculs de flux de puissance en régime permanent et de court-circuit sans pas de temps. Les solveurs de domaine temporel à phasors et RMS modélisent la dynamique électromécanique en se basant sur le comportement moyen du réseau. Les solveurs EMT modélisent les formes d'onde électriques complètes, ce qui permet de visualiser directement les effets liés à la commutation, à la saturation et aux protections rapides.
Ces familles se distinguent également par la manière dont elles résolvent les équations à chaque pas de temps. La méthode du flux de puissance utilise généralement une itération de type Newton sur des équations algébriques, tandis que les solveurs EMT et RMS intègrent des équations différentielles algébriques qui combinent les contraintes du réseau et la dynamique des dispositifs. L'EMT à pas de temps fixe privilégie la précision reproductible des formes d'onde, tandis que le RMS à pas de temps variable se concentre souvent sur des simulations de longue durée avec une erreur dynamique acceptable. Des termes relatifs aux solveurs tels que « explicite », « implicite », « trapézoïdal » et « Euler arrière » décrivent le comportement de l'intégrateur lorsque le système présente une combinaison de dynamiques rapides et lentes.
Une bonne façon de s'y retrouver consiste à se demander ce que représentent réellement les paramètres de votre modèle. Les modèles RMS et phasoriques représentent généralement les amplitudes et les angles de la fréquence fondamentale ; ils ne mettront donc pas en évidence l'ondulation PWM ni les pics inférieurs au cycle qui déclenchent certaines protections. Les modèles EMT représentent les tensions et courants instantanés, ce qui leur permet de détecter les chevauchements de commutation, les effets de récupération des diodes et les effets de propagation des ondes lorsque les détails de la ligne sont importants. Une fois que vous avez choisi la famille de solveurs, le reste de la configuration n'est pas un « réglage », mais une adaptation des paramètres numériques à la physique que vous avez choisi de représenter.
Adapter les objectifs de l'étude à la simulation EMT et dans le domaine des phaseurs
La simulation EMT est la solution idéale lorsque la réponse dépend des détails de la forme d'onde, des commutations rapides ou des interactions à l'échelle du sous-cycle entre le réseau et les appareils. La simulation par phasors et RMS est la solution idéale lorsque la réponse dépend de dynamiques plus lentes, de limites en régime permanent ou du comportement au niveau du système sur plusieurs cycles. La méthode que vous choisissez détermine la limite maximale du phénomène le plus rapide auquel vous pouvez vous fier. Cette limite est plus importante que la durée d'exécution.
Une méthode concrète pour faire ce choix consiste à formuler votre question ainsi : « Quels éléments faut-il analyser en fonction du temps pour répondre à cette question ? » Prenons l'exemple d'une ligne d'alimentation industrielle de 13,8 kV équipée d'un variateur de fréquence (VFD), d'un banc de condensateurs et d'un relais de surintensité, installée à proximité d'une charge de processus sensible. Si vous avez besoin d'observer les pics de courant d'appel des condensateurs, les creux de commutation du pont de diodes et le déclenchement du relais sur un courant déformé, l'EMT sera la seule méthode permettant de mettre en évidence ces détails sans recourir à des hypothèses lourdes. Si vous avez uniquement besoin de connaître la tendance de rétablissement de la tension sur plusieurs dizaines de secondes après le redémarrage d'un moteur, une étude par phasor ou RMS fournira une réponse plus rapide avec moins de détails de modélisation.
| Ce que vous devez apprendre | Méthode qui convient généralement | Quel sera le facteur déterminant pour la précision ? |
| Tensions en régime permanent, pertes et charge des équipements | Flux de puissance à l'aide d'un solveur de réseaux algébriques | La qualité des données du modèle et la cohérence des valeurs de base auront plus d'importance que les paramètres du solveur |
| Réponse en fréquence et en angle du générateur sur quelques secondes | Simulation électromécanique des grandeurs phasoriques ou de la valeur efficace | Les modèles de machines, de régulateurs et d'excitateurs, ainsi que la chronométrie des événements, domineront les résultats |
| Interactions liées au contrôle des convertisseurs et distorsions liées à la commutation | Simulation EMT dans le domaine temporel | Le pas de temps, les détails du modèle de commutation et l'échantillonnage de commande détermineront ce à quoi vous pouvez vous fier |
| Détection de protection basée sur les pics de sous-cycle ou la distorsion | Modélisation de la protection basée sur les ondes ou les signaux | Le filtrage anti-crénelage, les fenêtres de mesure et la stabilité de la méthode d'intégration auront leur importance |
| Profils de tension d'alimentation sur de longues durées, avec de nombreux changements de charge | Séries chronologiques quasi-statiques obtenues à partir de solutions en régime permanent | Ce sont les modèles de charge, la logique de commutation et la séquence des événements qui primeront, et non les détails à l'échelle de la microseconde |
| Ondes progressives et propagation des surtensions le long de conducteurs de grande longueur | EMT avec représentation en lignes réparties | Les effets de propagation varient proportionnellement à la vitesse de la lumière, qui est de 299 792 458 m/s; la résolution temporelle doit donc tenir compte de ces délais |
Une fois l'objectif clairement défini, les flux de travail mixtes deviennent plus faciles à gérer. Commencez par une méthode plus simple pour définir les conditions initiales et vérifier la validité des points de fonctionnement, puis passez à l'EMT uniquement lorsque la physique l'exige. Un solveur ne comble pas les lacunes du modèle, et des détails supplémentaires ne sauvent pas un solveur incapable de reproduire le comportement sur lequel repose votre problématique. Choisissez la méthode adaptée à votre problématique, puis configurez les paramètres numériques de manière à valider ce choix.
Utilisez les paramètres de pas de temps et d'intégration pour contrôler la précision
Le pas de temps et la méthode d'intégration déterminent l'erreur numérique, l'amortissement numérique et la stabilité ; ils influencent donc directement l'interprétation que vous ferez d'un graphique. Un pas de temps trop grand lissera les pics et déformera la phase, même si la simulation « fonctionne correctement ». Une méthode trop agressive en matière d'amortissement masquera les oscillations qui sont importantes pour le contrôle ou la protection. Les bons paramètres découlent de la dynamique la plus rapide que vous devez résoudre, et non des valeurs par défaut.
L'EMT à pas fixe donne généralement de meilleurs résultats lorsque l'on définit ce pas en fonction de la fréquence de commutation, des plus petites constantes de temps L et C, et de l'échantillonnage de contrôle le plus rapide du modèle. Une vérification technique courante consiste à conserver suffisamment de points par période de commutation pour que les fronts de commutation ne se fondent pas en un ou deux échantillons, puis à s'assurer que les grandeurs clés ne varient pas beaucoup si l'on divise par deux le pas de temps. L'intégration trapézoïdale préserve bien les détails de la forme d'onde, mais elle peut présenter un effet de résonance numérique si les discontinuités sont marquées. La méthode d'Euler arrière atténuera les composantes haute fréquence, ce qui peut contribuer à la stabilité mais peut également masquer l'ondulation même que vous aviez besoin de voir.
- Définissez un pas de temps maximal en fonction de votre constante de temps physique la plus rapide
- Évaluez le choix de l'intégrateur en fonction de vos besoins en matière de résolution des ondulations par rapport à l'atténuation
- Alignez les temps d'échantillonnage du contrôleur sur le pas de simulation afin d'éviter toute dérive temporelle
- Définir les tolérances du solveur non linéaire afin que les courants et les tensions convergent étroitement
- Relancer une analyse sur une courte période avec un pas plus fin pour vérifier que les principaux résultats sont valables
Les problèmes de précision donnent souvent l'impression d'une « physique étrange », mais leur cause est d'ordre numérique. Les pics observés aux instants de commutation peuvent être des artefacts liés au pas de temps, tandis que l'absence de dépassement peut être due à un amortissement numérique. La gestion des événements joue également un rôle important, car les opérations des disjoncteurs et les activations des limiteurs peuvent créer des discontinuités qui sollicitent fortement l'intégrateur. En considérant le pas de temps comme un paramètre de modélisation et non comme un simple réglage de performance, vous éviterez de longues séries d'essais et d'erreurs.
Gérer les réseaux rigides et les dispositifs non linéaires sans problèmes de convergence
Les systèmes rigides combinent des dynamiques très rapides et d'autres beaucoup plus lentes, et cette combinaison peut rendre les méthodes explicites instables ou imposer des pas de calcul d'une taille trop petite pour être pratique. Les dispositifs non linéaires introduisent des résolutions itératives à chaque étape, de sorte que les paramètres de convergence deviennent un facteur de précision et ne servent plus seulement à faire cesser les avertissements. Les commutateurs idéaux, les composants magnétiques saturés et les limites strictes créent des discontinuités qui compliquent les itérations. Des résultats stables sont obtenus grâce à un solveur adapté à la rigidité du système et à un modèle qui évite les idéalisations irréalistes.
Les solutions pratiques commencent généralement par les modèles de dispositifs. Les résistances parasites, les amortisseurs et une impédance de source réaliste permettent d'éliminer les exigences infinies en matière de di ou de dv, auxquelles aucune méthode numérique ne peut répondre. Les fonctions de limitation plus douces se comportent souvent mieux que l'écrêtage brutal, car elles réduisent les changements brusques de la matrice jacobienne lors des itérations de Newton. La cohérence des conditions initiales est également importante, car un solveur qui démarre loin d'un point de fonctionnement viable gaspillera des itérations et risque de aboutir à des états non physiques.
La transparence de l'outil est ici un atout, car elle permet de voir quelle équation pose réellement problème lorsque la convergence est rompue. C'est pour cette raison que SPS SOFTWARE est souvent utilisé dans les milieux de l'enseignement et de la recherche, car les modèles de composants modifiables permettent de repérer plus facilement où une hypothèse « idéale » a créé une rigidité ou où un limiteur a généré une boucle algébrique. Une fois que le modèle est physiquement plausible, l'intégration implicite et des tolérances raisonnables feront leur travail.
« La réussite de la convergence n'est pas une question de chance, mais le résultat du réalisme du modèle et de l'alignement numérique. »
Valider les résultats à l'aide des conditions initiales, des limites et de contrôles de cohérence
La validation est l'étape qui permet de vérifier que le choix de votre solveur n'a pas masqué une erreur de modélisation. Les conditions initiales doivent correspondre à l'état stationnaire que vous visez, sinon la simulation consacrera ses premiers cycles à corriger un décalage que vous n'aviez pas l'intention d'étudier. Les limites physiques doivent être respectées, telles que la continuité de la tension des condensateurs et la continuité du courant des inductances lors des événements de commutation. Des contrôles de cohérence élémentaires permettront de détecter les erreurs d'unité, les erreurs de signe et les valeurs de consigne impossibles avant que vous ne vous fiiez aux résultats plus approfondis.
Commencez par les vérifications les plus simples qui ne nécessitent pas d'outil supplémentaire. Vérifiez que les tensions et les courants correspondent aux valeurs attendues en régime permanent, que les bilans de puissance sont cohérents et que les états des composants sont conformes à la logique de commande. Assurez-vous que les éléments de protection reçoivent les mêmes mesures que celles que vous pensez avoir modélisées, y compris les éventuels filtres et fenêtres de mesure. Une simulation de courte durée avec un pas de temps réduit constitue également un excellent moyen de vérification, car des écarts importants indiquent une sensibilité numérique qu'il convient de corriger avant d'interpréter les détails.
Les limites et les invariants apportent un niveau de confiance supplémentaire. La saturation doit écrêter le flux ou le courant là où le modèle le prévoit, et non là où l'intégrateur peut le tolérer. L'énergie stockée dans les inductances et les condensateurs ne doit pas augmenter en l'absence de source, et l'amortissement ne doit pas apparaître de nulle part. Lorsque la validation est rigoureuse, le choix du solveur devient une variable technique maîtrisée plutôt qu'une source cachée d'incertitude.
Évitez les erreurs courantes dans le choix des solveurs pour les convertisseurs et les études de protection
La plupart des erreurs de calculateur proviennent du fait de poser une question relative à une forme d'onde à l'aide d'une méthode qui n'est pas adaptée aux formes d'onde, ou d'utiliser une méthode EMT avec des paramètres qui ne permettent pas de modéliser le comportement recherché. Les modèles de convertisseurs amplifient ce problème, car la commutation, l'échantillonnage de contrôle et les limites non linéaires se succèdent à intervalles très courts. Les modèles de protection l'amplifient encore davantage, car la captation et la synchronisation peuvent dépendre des pics, de la distorsion et des fenêtres de mesure. Vous obtiendrez de meilleurs résultats si vous considérez les paramètres du solveur comme faisant partie intégrante de la conception de la protection ou du convertisseur, et non comme un élément ajouté après coup.
Les analyses phasorielles échouent souvent dans le cadre des travaux sur les convertisseurs et les protections lorsque les déclencheurs clés dépendent de la distorsion, des décalages en courant continu ou de caractéristiques subcycliques. Les analyses EMT échouent lorsque le pas de temps est trop grand, lorsque l'intégrateur ajoute un amortissement qui masque l'ondulation, ou lorsque des modèles de dispositifs idéalisés créent des discontinuités qui forcent des raccourcis de convergence. Un autre problème courant consiste à mélanger la logique discrète avec un pas de temps variable sans vérifier la synchronisation des événements, car une dérive de synchronisation peut décaler les opérations des relais ou les changements d'état de contrôle. Un alignement clair entre les temps d'échantillonnage, de commutation et d'intégration empêche ces erreurs de s'introduire.
La meilleure habitude à long terme consiste à noter ce qui doit être résolu, puis à choisir la méthode la plus simple qui permette néanmoins d'y parvenir clairement. Une brève simulation pilote permettant de vérifier la convergence, la sensibilité au pas de temps et le comportement des mesures fera gagner plus de temps que de devoir corriger des graphiques « étranges » à un stade avancé du projet. Les équipes qui travaillent avec SPS SOFTWARE formalisent souvent cette démarche dans la configuration de leur modèle, car des équations transparentes et des modèles modifiables rendent les hypothèses du solveur visibles et vérifiables. C'est cette rigueur, plus que n'importe quel paramètre du solveur, qui transforme la simulation d'une simple image en preuve technique.