主要收获
- 根据您需要做出的决策选择开关细节,因为只有当模型实际代表开关行为时,纹波、峰值和谐波才具有可信度。
- 从您将要分析的最快速行为中选择时间步长,然后通过收敛性检查验证,确保峰值应力、纹波和损耗不随步长变化。
- 通过精准细节控制和谨慎的输出采样来调控运行时,因为粗放的存储或错位的开关事件可能掩盖混叠现象并产生虚假的低频效应。
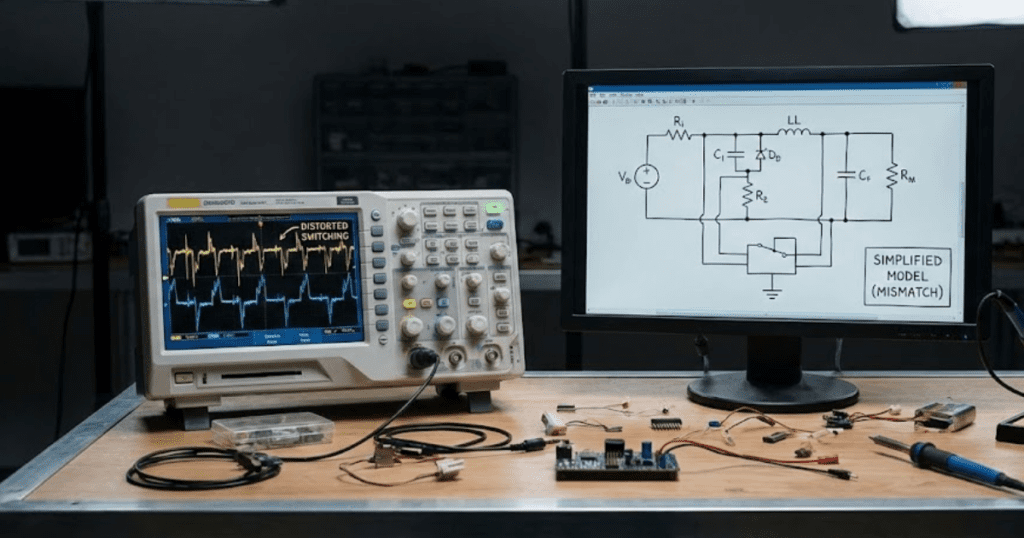
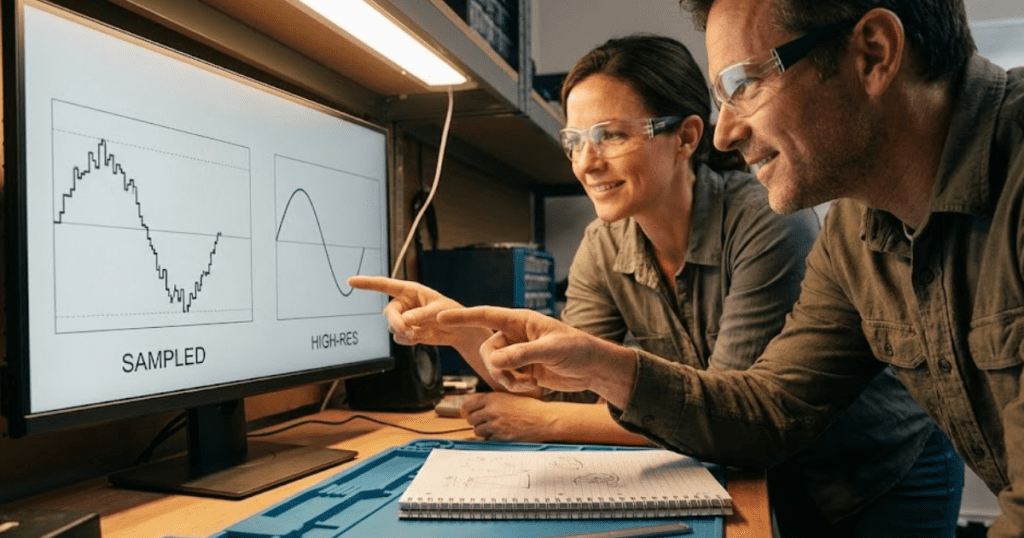
开关模型能生成实验台上可见的波形,但同时也给仿真器带来了最棘手的数值问题:尖锐的波形边缘、宽带谐波以及刚性的能量存储。采样理论在此奠定基调——要避免混叠效应,信号的采样率必须高于目标最高频率的两倍。时间步长的选择,本质上就是将采样率换算为秒单位后的结果。
平均模型与切换模型并非竞争性的“精度等级”,而是不同的工具。最可靠的结果源于将模型细节与研究问题相匹配,然后选择能解析您关注的最快行为的时间步长——而非解析方案中任何位置存在的最快行为。
“您的转换器仿真结果的可靠性,完全取决于开关细节和时间步长的设定。”
根据研究目标选择开关式或平均式转换器模型
当需要分析纹波、峰值、谐波成分、器件应力或与保护电路及寄生元件的详细交互时,应采用开关模型。当需要研究控制行为、稳态工作点、缓慢瞬态过程,或在开关纹波会干扰分析结果的系统研究中,则应采用平均模型。正确的选择取决于您需要解决的问题类型。
开关模型体现了半导体器件的离散开关状态,因此会自然产生PWM纹波、二极管恢复效应以及高dv/dt和di/dt尖峰。这种保真度对电容纹波电流、变压器磁通摆幅、滤波器阻尼及控制器采样效应至关重要,因为这些参数取决于瞬态波形而非其平均值。当需要峰值而非均方根值时,保真度同样关键——峰值往往决定着热设计和可靠性极限。
平均化模型通过控制源或等效占空比依赖关系替代开关网络。此举可消除载波频率成分,通常使仿真在更大时间步长下保持稳定,并允许研究更长的时段。若您的目标是网格级交互、下垂响应、启动顺序或调谐环路带宽,平均化模型将以更少的数值陷阱提供更快的响应。
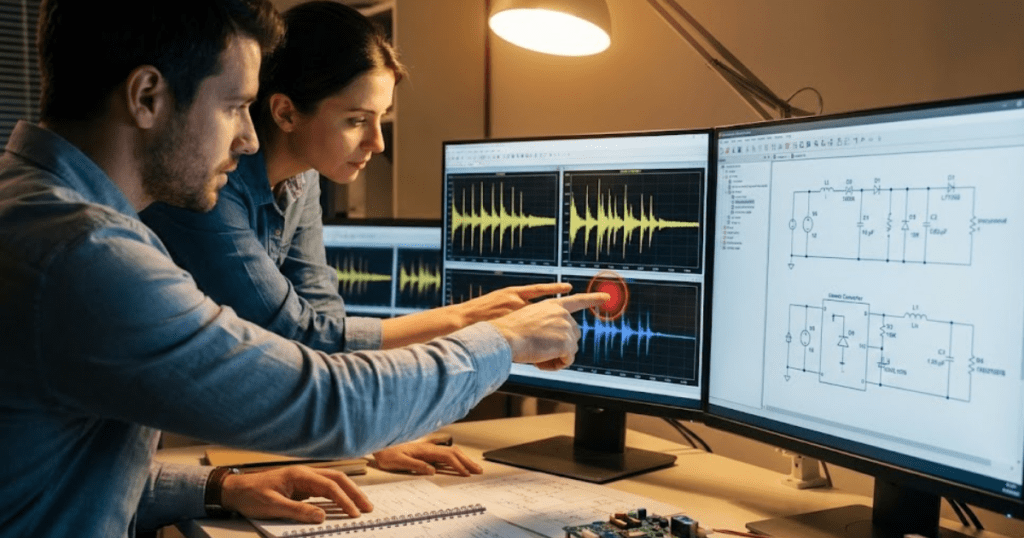
识别关键波形中切换细节的变化及其损耗
开关细节改变了模型在电气意义上对"真实"现象的处理方式:纹波、谐波和峰值应力从隐含状态转变为显式信号。这直接影响预测的传导损耗、开关损耗、磁性元件与电容器中的纹波发热,以及任何依赖采样电流和电压的控制逻辑。均值化处理则会消除载波效应并重塑这些结果。
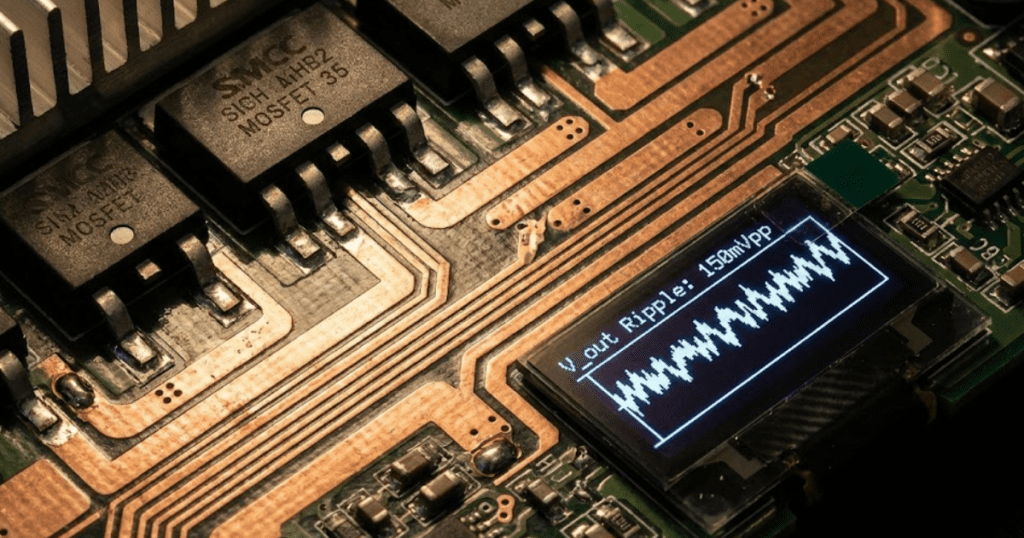
纹波并非表面现象。纹波电流的微小变化就可能使电容器从可接受的温升状态转为持续过热,而相同的纹波在滤波器和电缆中激发的谐振现象,在平均模型中根本不会显现。谐波问题不仅关乎电能质量报告,更因合规工作常涉及基波频率以上乃至开关频率以上的谐波范围而至关重要。
一个有用的参考点是传导发射实践,因为CISPR 11标准中干扰限值的评估范围为150 kHz至30 MHz。若开关边缘速度足够快或寄生参数得到准确建模,开关模型将产生覆盖该频段的内容,而时间步长的选择将决定频谱中哪些部分具有可信度。 若过度平滑开关细节,虽仍能获得"干净"的波形,但其"干净"实则源于错误的建模方式。
根据开关频率和控制带宽设定仿真时间步长
实际时间步长应从需要解析的最快行为开始计算,并预留余量以确保数值积分不会模糊边界或改变相位。对于开关模型,该行为通常包括PWM载波周期、死区时间以及需要保留的任何谐振振铃现象。对于平均模型,最快行为通常表现为控制带宽和主导被控对象极点。
考虑一个20 kHz的PWM转换器,其中需要关注电感纹波电流和瞬态过程中的开关峰值电流。开关周期为50 µs,因此采用约0.5 µs的时间步长可获得每周期100个采样点,通常能准确捕捉纹波波形而不将每个边沿转化为阶梯状。 若模型包含需观察的200ns死区时间或数MHz振铃现象,该时间步长将不再适用,此时必须逐步缩小时间步长,直至这些特征在精化过程中停止位移。
控制系统引入了第二重约束。当考虑采样与调制延迟时,具有千赫兹级带宽的数字控制器即使采用粗糙时间步长看似稳定,其相位裕度仍可能存在偏差。最稳妥的工作流程是将时间步长与图表或指标中最高频率绑定,随后通过将时间步长减半验证收敛性——检查关键结果(如纹波幅度和峰值器件电流)是否趋于稳定值。
| 您需要从模拟中获得什么 | 支持该需求的模型细节 | 保持结果可信度的时步检查点 |
| 环路调谐与持续数秒的缓慢瞬态响应 | 具有显式控制和限值的平均转换器 | 时步解决控制带宽和主导被控对象动态特性,而非PWM载波问题。 |
| 纹波电流、峰值应力及谐波结构 | 带PWM和设备状态的切换模型 | 时步在每个切换周期内提供多个点,因此当精度提高时,纹波和峰值停止偏移。 |
| 保护时序与阈值穿越 | 若阈值取决于瞬时纹波,则切换模型 | 时间步长足够小,使得阈值事件在不同细化级别中发生的时间保持一致。 |
| 滤波器谐振与电缆相互作用 | 根据目标谐振频率进行切换或平均 | 时步不仅能以舒适的相位精度解析谐振频率,更能精确捕捉振幅变化。 |
| 用于热力检查的能量与损耗核算 | 若损耗取决于纹波与边沿时序,则切换模型 | 时间步长足够紧凑,使得每周期积分损失收敛且不随步长漂移。 |
使用数值稳定性检查来确认时间步长足够小
当求解结果收敛且求解器在不施加人工阻尼的情况下保持稳定时,时间步长即为"足够小"。收敛意味着当时间步长减半时,关键参数的变化可忽略不计,而非波形外观平滑。稳定性则指能量不会无故增长,且振荡现象符合电路物理特性而非数值伪像。
首先进行两项快速检查:以更小的时间步长运行相同案例,对比少量指标数据;随后排查非物理行为,例如负损失、仅在特定步长出现的振荡,或随精度提升而频率偏移的振铃现象。 当时间步长过大时,峰值往往最先出现异常——它们可能被截断或时间偏移却毫无预警。若观察到不稳定现象,请将其视为建模信号:寄生电感、理想开关及刚性控制动作都可能导致数值计算困难,即便拓扑结构本身无误。
工具的价值在于保持透明性。SPS SOFTWARE支持开放可编辑的组件模型,使您能够检查方程、识别刚性元件,并决定是否应添加实际阻尼、优化寄生元件,或在网络中产生最快动态响应的区域减少时间步长。这种工作流程往往优于试错法,因为您能明确导致数值问题的物理成因。
在本地优化与事件处理中平衡运行时与准确性
运行时控制的关键在于:在关键部位采用高精度分辨率,而在非关键部位则适当放宽要求。开关过渡过程和高频谐振现象需要细小的时间步长,但电力系统模型的许多部分变化缓慢。均衡的设置方案是在变流器和敏感节点周围采用精细分辨率,同时在仿真器支持的情况下,其他区域则使用较粗的分辨率。
局部细化在满足测量需求时效果最佳。若仅关注公共耦合点处的电网电压畸变,可将详细开关过程保留在转换器内部,对远端馈线采用简化细节或聚合处理。若关注器件应力,则需在器件附近保留细节,避免将计算时间耗费在远场动态上——这些动态不会影响开关周期内的峰值。
事件处理至关重要,因为开关操作具有不连续性。若仿真器显式模拟门控事件,则需确保这些事件在一致时间点触发,否则占空比将随时间步长波动。即使仿真器采用自适应步进法,仍需设置防护机制,避免在解读纹波的区间内步长过度扩大。目标并非追求"快速运行",而是确保每秒计算都能产出经得起推敲的可靠信息。
最稳妥的做法是先写下需要测量的内容,然后证明你的时间步长能够测量它。
避免常见的时间步长错误,这些错误会掩盖波纹和混叠现象
大多数转换器不良结果源于若干可重复的失误,这些失误使波形图看似合理,却导致关键指标偏移。混叠效应最为危险,它会将高频内容转化为低频伪像,这些伪像看似控制问题或谐振现象。规范的设置应将时间步长、输出采样和开关逻辑视为统一系统。
- 选择导致每个切换周期采样点过少的时间步长,然后依赖纹波幅值和峰值电流
- 以粗略输出间隔保存波形,将开关纹波混叠为虚假的低频振荡
- 使用理想开关(无寄生效应),随后通过过大的时间步长进行补偿,该补偿机制实质上起到了隐性阻尼的作用。
- 允许开关事件发生在时间步之间,从而实现与步长相关的有效占空比偏移
- 仅验证平均值,却忽略了峰值和损失尚未收敛
该验证过程可以很简单,例如将时间步长减半,直到峰值、纹波和综合损耗停止显著变化。重复几次后,你就能开始识别出模型细节是否超出研究目标所需,或是模型平均化程度是否足以支撑面向硬件的决策。
当您将建模视为一门工程学科而非黑箱操作时,SPS软件便能发挥最大价值。透明的模型使您更容易解释为何选择特定开关模型、为何设定特定时间步长,以及当有人询问步长变化时结果为何保持稳定。正是这种习惯,让变流器仿真从"看起来正确"转变为"足够准确以供决策"。