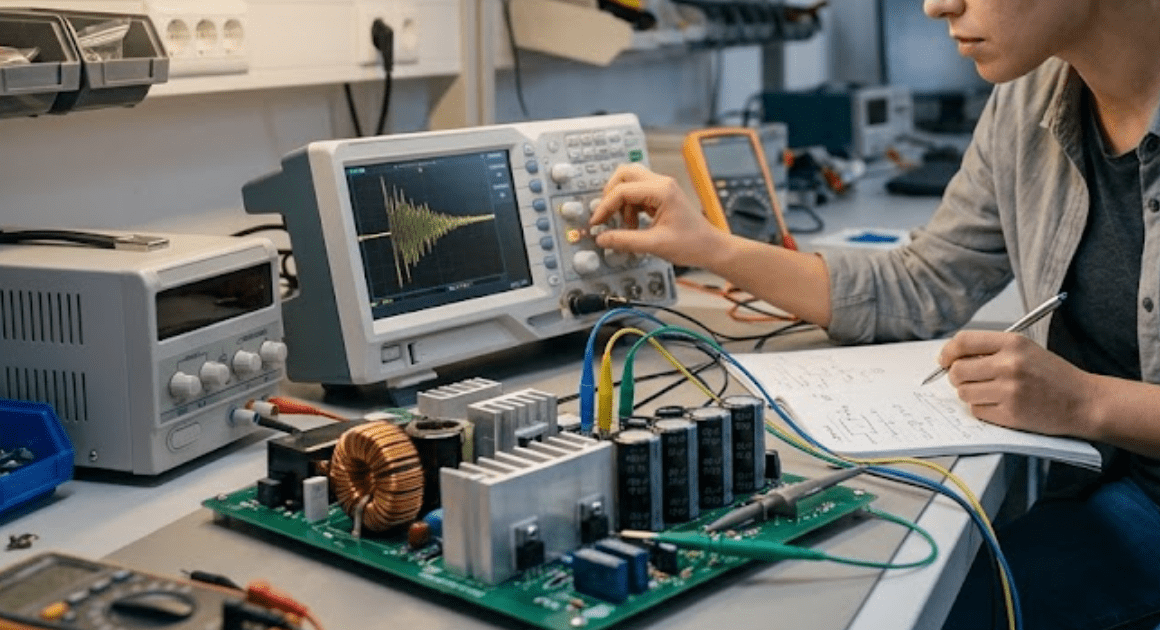
本指南介绍了双脉冲测试的测量内容、如何设置仿真,以及如何在进行台架硬件测试前估算开关能量。



本指南介绍了双脉冲测试的测量内容、如何设置仿真,以及如何在进行台架硬件测试前估算开关能量。
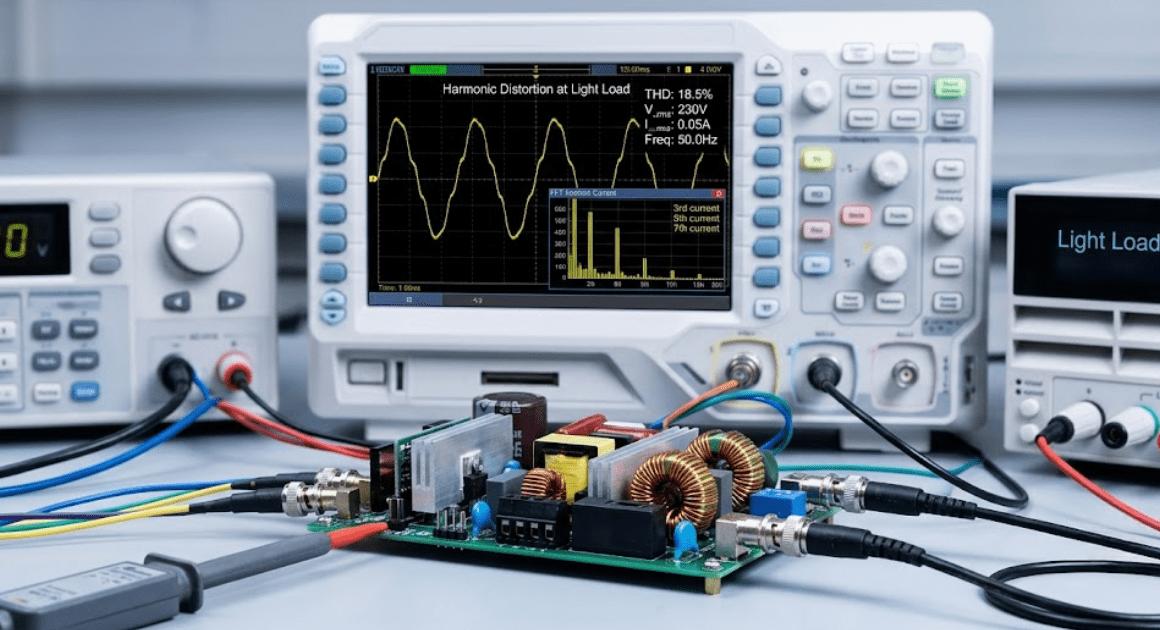
本指南介绍了如何在时域仿真中进行谐波分析和电能质量分析、建模非线性负载、计算总谐波失真,以及检查相应母线的限值。
本指南概述了六项仿真验证,可帮助工程师在进行硬件测试之前,对功率因数校正级进行控制稳定性、启动响应和谐波失真的测试。
通过分析变压器和配电网络中的铁磁共振现象,可以解释开关触发机制、过电压机制、仿真设置、接地效应以及预防措施。

本文阐述了如何为电网支撑研究建立电池储能系统的模型,重点关注电量状态限制、逆变器控制、系统逻辑以及故障响应。
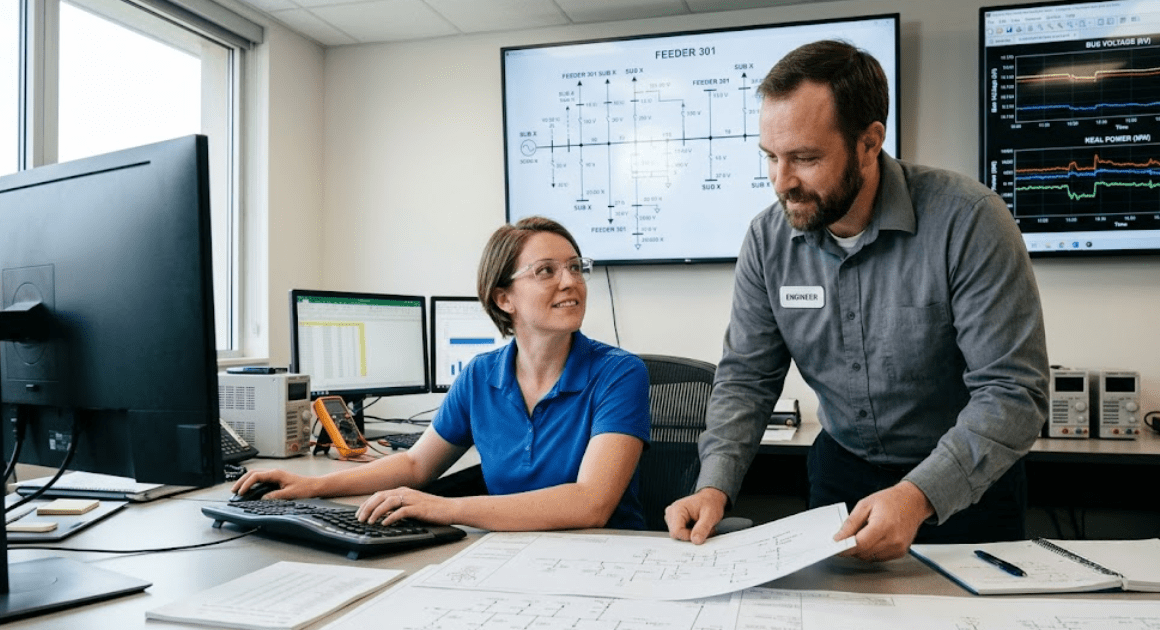
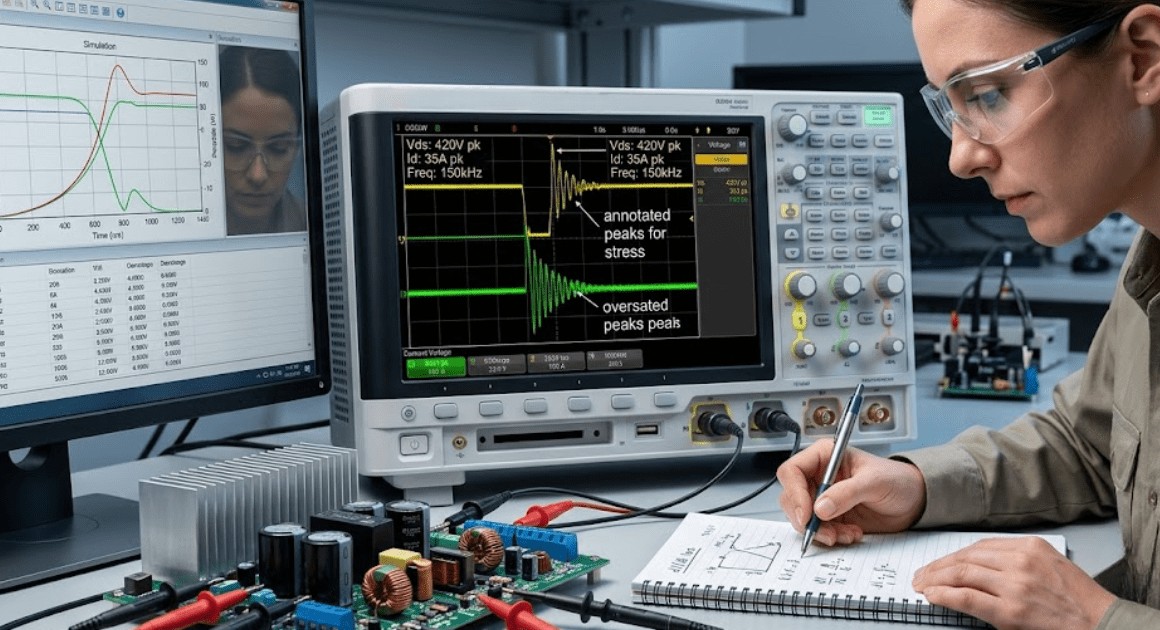
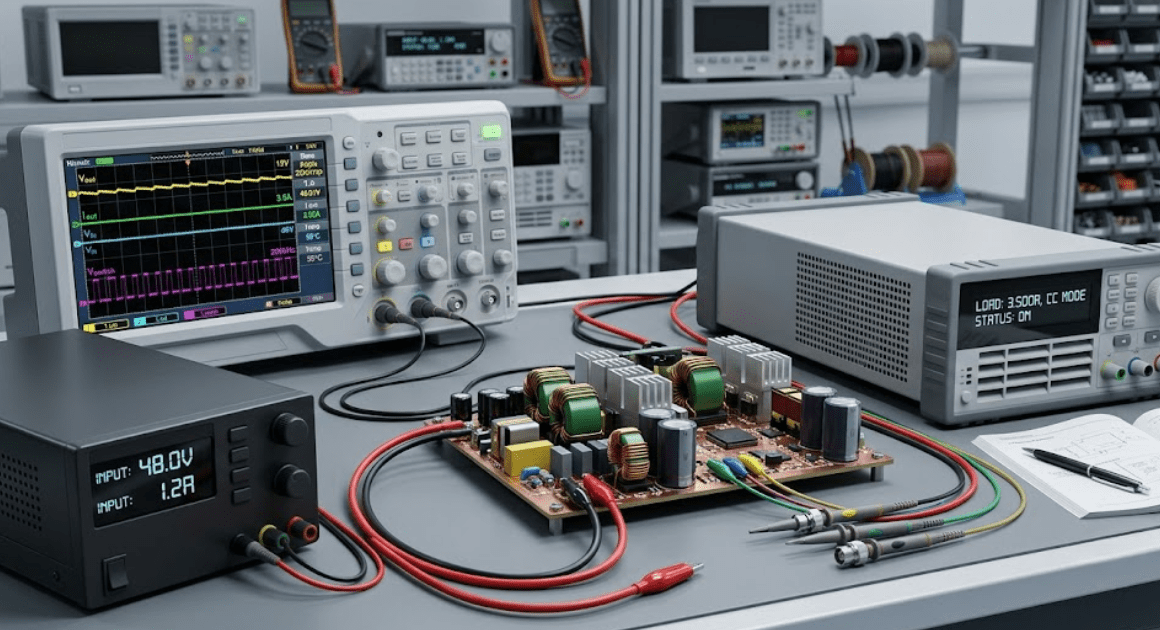
本指南介绍了如何通过仿真、工作边界条件、控制检查、热分析、故障研究以及实验室测试前的硬件前检查清单,对电源转换器原型进行验证。
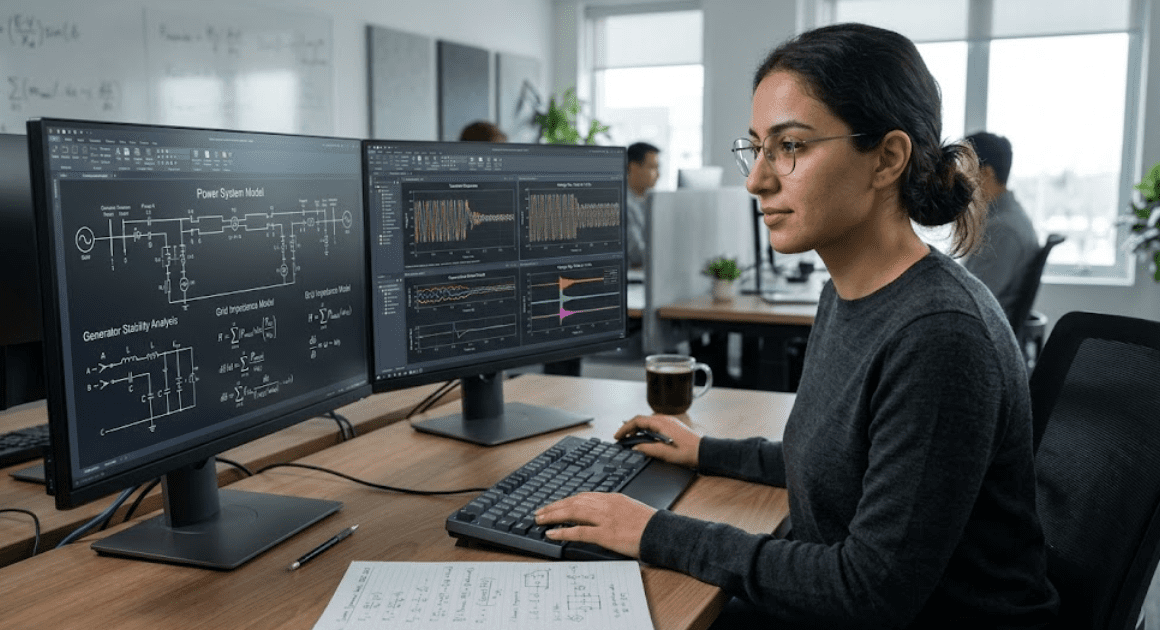
一份关于如何根据求解器可见性、模型开放性、时间步长控制、初始化、数据访问以及工作流适配性,选择EMT仿真软件和用于暂态分析的电力系统分析软件的实用指南。
本文介绍了如何建模避雷器的行为、模拟雷电和开关暂态,以及验证变电站范围内的保护覆盖范围和能量分配情况。

