Principaux enseignements
- Une modélisation détaillée du convertisseur vous aide à prédire le comportement du contrôle avec confiance, plutôt que de vous fier à des hypothèses simplifiées qui masquent des dynamiques importantes.
- Les effets de commutation influencent le comportement des installations. Il est donc essentiel de prendre en compte les ondulations, le timing et les nuances des appareils pour régler le contrôleur avec précision.
- La simulation haute fidélité améliore l'alignement entre le logiciel et le matériel, réduisant ainsi les travaux de reconception à un stade avancé.
- Les modèles transparents facilitent la prise de décisions techniques éclairées, car vous comprenez exactement comment le convertisseur se comporte dans différentes conditions.
- Une approche de modélisation qui inclut le comportement de commutation vous aide à obtenir des performances de contrôle plus fiables et plus stables.
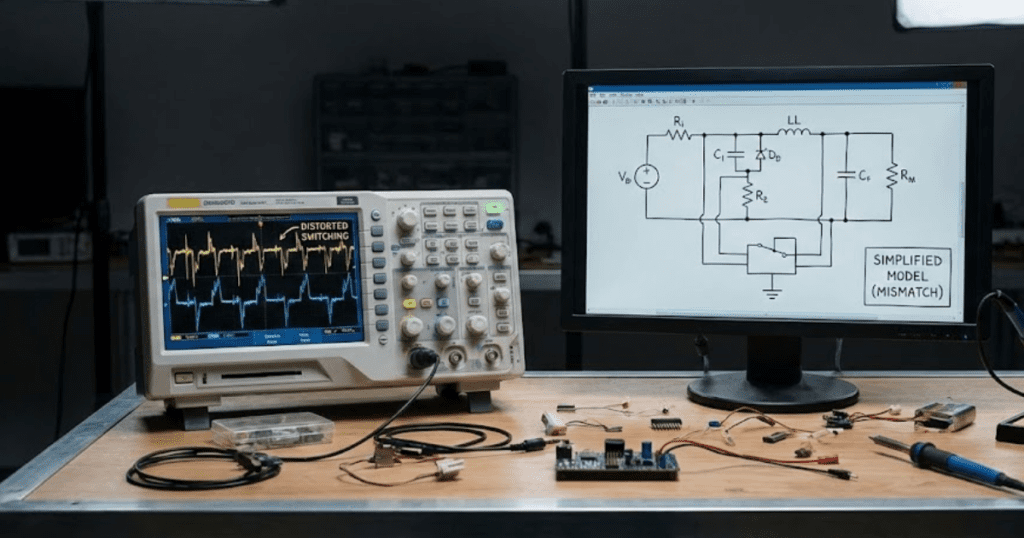
Les systèmes de contrôle des convertisseurs sont souvent peu performants car leurs modèles sous-jacents omettent des détails essentiels. Lorsqu'un contrôleur se comporte bien en simulation mais oscille sur le banc d'essai matériel, cela est souvent dû à un modèle de convertisseur trop simplifié. Les ingénieurs s'appuient parfois sur des représentations moyennes ou idéalisées qui omettent les nuances de commutation à haute fréquence. Sans la prise en compte des ondulations réelles et du comportement transitoire des commutateurs et des diodes, des instabilités subtiles peuvent être complètement ignorées. En conséquence, une boucle qui semblait stable en simulation peut soudainement devenir instable dans la réalité, ce qui oblige à procéder à un réajustement de dernière minute et entraîne des retards coûteux.
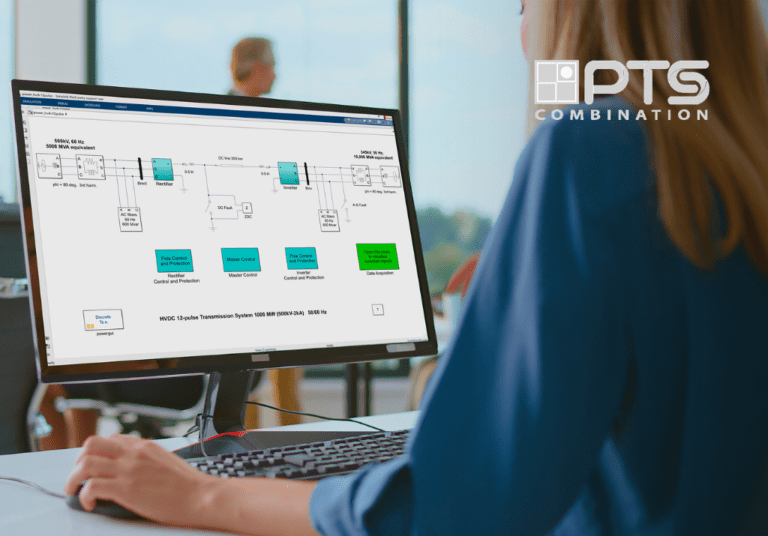
La modélisation haute fidélité est la solution. Les modèles de convertisseurs détaillés peuvent correspondre de très près au matériel physique. Une étude de simulation en temps réel a montré qu'un modèle ne s'écartait que d'environ 2 % du comportement réel de l'appareil. Grâce à une simulation transparente et basée sur la physique, les ingénieurs voient les mêmes oscillations et les mêmes retards qui apparaîtront sur le banc d'essai. Ce niveau de précision signifie que les contrôleurs sont réglés en fonction de formes d'onde réalistes dès le début du développement, ce qui aide les équipes à détecter les problèmes bien avant qu'ils ne se transforment en sérieux revers de conception. Cette méthode de conception permet d'avoir confiance dans le fait que le contrôleur fonctionnera comme prévu sur le matériel réel.
Les modèles de convertisseurs simplifiés induisent souvent en erreur lors de la conception des contrôleurs.
Les simplifications excessives typiques et leurs conséquences comprennent :
- Utilisation de modèles moyennés : le fait de traiter les commutateurs PWM comme des moyennes continues néglige l'ondulation et la dynamique rapide. Un modèle moyenné peut donner l'impression qu'un convertisseur est stable alors qu'il est en réalité sujet à des oscillations.
- En supposant des dispositifs idéaux : le fait de traiter les transistors et les diodes comme des commutateurs marche/arrêt parfaits sans aucun retard élimine les parasites réels. Cela peut masquer les effets de temps mort et les pics de récupération inverse qui perturbent le contrôle en boucle fermée.
- Négliger les éléments parasites : omettre les inductances, capacités ou résistances parasites dans les circuits du convertisseur masque les résonances et la distorsion des formes d'onde. Dans la pratique, cela entraîne des dépassements ou une instabilité inattendus une fois le matériel réel construit.
- Filtres trop simplifiés : l'utilisation d'un modèle de filtre RLC simple sans tenir compte de son comportement réel non idéal ignore la manière dont les composants du filtre interagissent à hautes fréquences. Les résonances ou les déphasages non détectés dans le filtre réel peuvent compromettre la boucle de contrôle conçue.
- Dissociation du contrôle et de la puissance : simuler le contrôleur séparément du convertisseur à niveau de commutation réel peut faire passer à côté d'interactions clés. Un contrôleur numérique modélisé de manière isolée peut se comporter de manière imprévisible une fois connecté à l'ensemble du réseau de commutation.
Ces raccourcis se retournent souvent contre les concepteurs de convertisseurs. Les ingénieurs doivent alors procéder à un débogage sans fin pour comprendre pourquoi leur contrôleur ne correspond pas au modèle. Les sections suivantes expliquent pourquoi il est essentiel d'inclure la dynamique de commutation dans le modèle pour obtenir un contrôle robuste du convertisseur.
« Les systèmes de contrôle des convertisseurs sont souvent peu performants car leurs modèles sous-jacents négligent des détails essentiels. »
La dynamique de commutation est cruciale pour un contrôle précis du convertisseur.
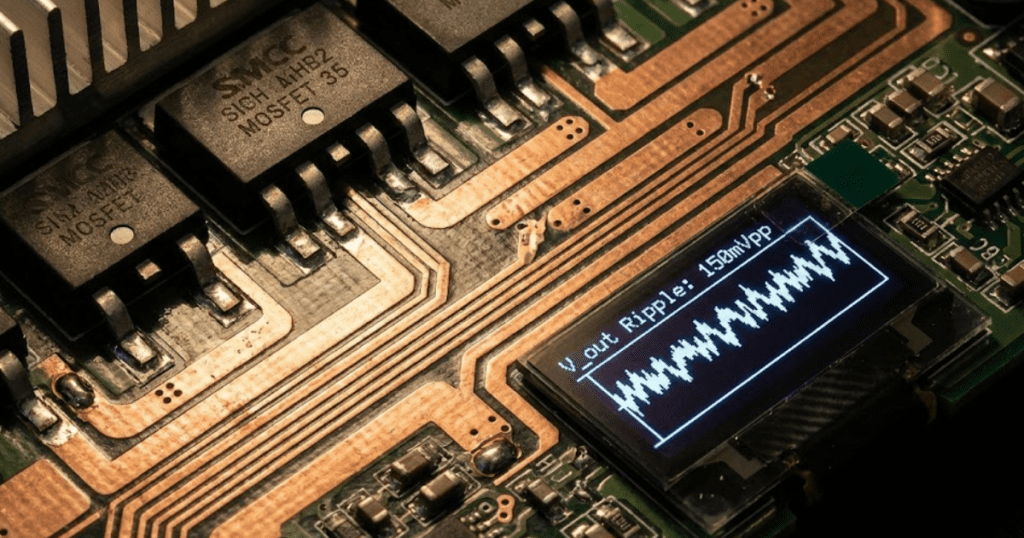
Ondulation de commutation et harmoniques à haute fréquence
Les convertisseurs à découpage introduisent des ondulations et des harmoniques à haute fréquence dans les tensions et les courants qui affectent les entrées du contrôleur. Un contrôleur réglé sur une forme d'onde lisse et moyenne peut interpréter à tort ces ondulations comme des perturbations. En réalité, ces harmoniques peuvent exciter les résonances du filtre ou du contrôle, provoquant des oscillations inattendues ou une dégradation des performances. La simulation précise de ces composants à haute fréquence permet aux ingénieurs de concevoir des filtres et des compensateurs afin de maintenir la stabilité de la boucle de contrôle dans des conditions de commutation réelles.
Retards aux portes et temps morts
Chaque commutateur à semi-conducteur nécessite un temps fini pour s'activer et se désactiver, ce qui est souvent négligé dans les modèles simples. Si une simulation ignore le temps mort, elle ne montrera pas la brève période pendant laquelle aucun transistor ne conduit. En pratique, le temps mort crée un circuit ouvert momentané dans le chemin du convertisseur, introduisant des décalages de courant ou de tension. Les contrôleurs doivent compenser ce décalage, sinon la boucle peut développer une erreur en régime permanent, voire une instabilité sous-harmonique. La prise en compte de ces nuances de timing dans un modèle garantit que le contrôleur tient compte des retards réels du matériel.
Comportement non linéaire du dispositif
Les dispositifs de puissance réels ne se comportent pas de manière idéale. Par exemple, la résistance à l'état passant d'un transistor et la chute de conduction d'une diode varient en fonction des conditions de fonctionnement et de la température. Un modèle simpliste pourrait les traiter comme des valeurs fixes, sans tenir compte de la manière dont elles modifient le gain et la phase du convertisseur sous charge. Les simulations détaillées incluent ces non-linéarités afin que le contrôleur puisse être réglé pour gérer de légères variations de gain. Cela permet d'éviter les surprises telles que les variations de bande passante ou de marge de phase lorsque le matériel chauffe ou fonctionne à proximité de ses limites.
EMI et effets de couplage
La commutation haute fréquence génère également des interférences électromagnétiques (EMI) qui peuvent se coupler aux circuits voisins. Une simulation sans sources de bruit réalistes ne montrera pas comment les pics de commutation affectent les capteurs ou les signaux du contrôleur. Dans le matériel, les interférences électromagnétiques peuvent provoquer de fausses impulsions de déclenchement ou des lectures de rétroaction erronées qui perturbent la logique de contrôle. En modélisant les fronts de commutation et en incluant un bruit réaliste ou un couplage EMI, les ingénieurs peuvent voir ces interactions et ajouter un blindage ou des filtres si nécessaire. Cela permet d'éviter des erreurs mystérieuses qui n'apparaîtraient que sur le banc d'essai.
En résumé, les événements de commutation introduisent des ondulations, des retards, des non-linéarités et du bruit qui influencent directement le comportement du convertisseur. Les contrôleurs conçus sans tenir compte de ces dynamiques peuvent perdre en stabilité ou en précision dans des conditions réelles. La section suivante montre comment une simulation détaillée révèle les interactions entre ces effets et les stratégies de contrôle.
Des simulations détaillées révèlent des interactions cachées pour un contrôle robuste
Au-delà des effets de commutation évidents, une simulation détaillée peut révéler des interactions subtiles que les modèles plus simples ne permettent pas de détecter. Même de petits chemins de couplage ou des modes rarement excités peuvent déstabiliser un convertisseur s'ils sont ignorés. La liste suivante illustre les phénomènes cachés que seul un modèle haute fidélité permet de détecter :
- Capteurs et limites d'échantillonnage : les convertisseurs réels mesurent les tensions et les courants à l'aide de capteurs et de convertisseurs analogiques-numériques ayant des limites finies. Un modèle détaillé peut montrer quand une lecture de capteur sature ou présente un aliasing, ce qui amène le contrôleur à voir des valeurs incorrectes et à réagir de manière inappropriée.
- Couplage de résonance du filtre : les circuits d'alimentation présentent des résonances parasites qui apparaissent sous certaines charges. Ces résonances peuvent amplifier certaines fréquences dans la forme d'onde de commutation. Une simulation haute fidélité révèle ces pics de résonance afin que les ingénieurs puissent ajouter un amortissement ou ajuster les gains de contrôle pour éviter les oscillations.
- Interactions avec l'impédance de la source : si le convertisseur est connecté à un réseau ou à une source faible, la forme d'onde de commutation interagit avec cette impédance, provoquant des variations de tension ou des distorsions qui ne sont pas observées en isolation. Les modèles détaillés incluent l'impédance de la source afin que la stabilité du contrôle puisse être testée dans des conditions d'alimentation réalistes.
- Limites thermiques et de puissance : les modèles détaillés peuvent inclure la manière dont les pertes de puissance et la température affectent les valeurs des composants. À mesure qu'un convertisseur chauffe, les caractéristiques du dispositif dérivent. Un modèle haute fidélité vous permet de voir si un contrôleur reste stable et précis lorsque les conditions changent, ce qu'un modèle simple ne permet pas de montrer.
- Couplage multi-boucles: les convertisseurs complexes utilisent souvent plusieurs boucles de rétroaction (par exemple, une boucle de courant interne et une boucle de tension externe). Dans une simulation détaillée, les interactions entre ces boucles lors des transitoires de commutation deviennent apparentes. Cela permet un réglage robuste de chaque boucle dans le contexte du système complet.
Dans chaque cas, ces problèmes cachés pourraient entraîner une instabilité ou des performances médiocres si seul le comportement de base était modélisé. Des simulations détaillées les mettent en évidence, permettant aux ingénieurs de concevoir des contrôleurs qui gèrent réellement les conditions réelles. Les équipes qui investissent tôt dans la fidélité des modèles acquièrent la certitude que leur conception passera sans encombre de la simulation au matériel.
Les modèles haute fidélité garantissent la fiabilité du contrôle, de la simulation au matériel.
Une simulation réaliste relie étroitement ce qui se passe dans le logiciel à ce que les ingénieurs voient sur le banc d'essai matériel. En incluant le comportement complet de commutation et les nuances des composants, un modèle haute fidélité produit des formes d'onde et des réponses presque identiques à celles du système physique. En fait, les simulateurs basés sur des FPGA atteignent désormais des étapes d'intégration inférieures à 100 ns, soit environ 100 fois plus courtes que les périodes de commutation typiques des convertisseurs, capturant ainsi chaque ondulation et chaque transitoire. Avec ce niveau de détail, le convertisseur simulé se comporte exactement comme le convertisseur réel, de sorte qu'un contrôleur réglé dans le modèle fonctionne de manière fiable sur le matériel.
Cette fidélité se traduit par un gain de productivité. Les équipes peuvent éviter les cycles supplémentaires de réglage du matériel, car la conception a déjà été validée lors de la simulation. Des modèles précis réduisent le risque de surprises de dernière minute lors des tests du système, ce qui permet d'économiser des semaines de débogage. De plus, les informations fournies par des formes d'onde précises permettent d'affiner les filtres et les compensateurs pour obtenir les meilleures performances. En bref, la simulation haute fidélité comble le fossé avec le matériel et permet aux ingénieurs de fournir des commandes de convertisseur stables et précises dès le premier essai.
« Des simulations détaillées les mettent en évidence, permettant aux ingénieurs de concevoir des contrôleurs qui gèrent réellement les conditions réelles. »
Le logiciel SPS garantit la fidélité du contrôle du convertisseur.
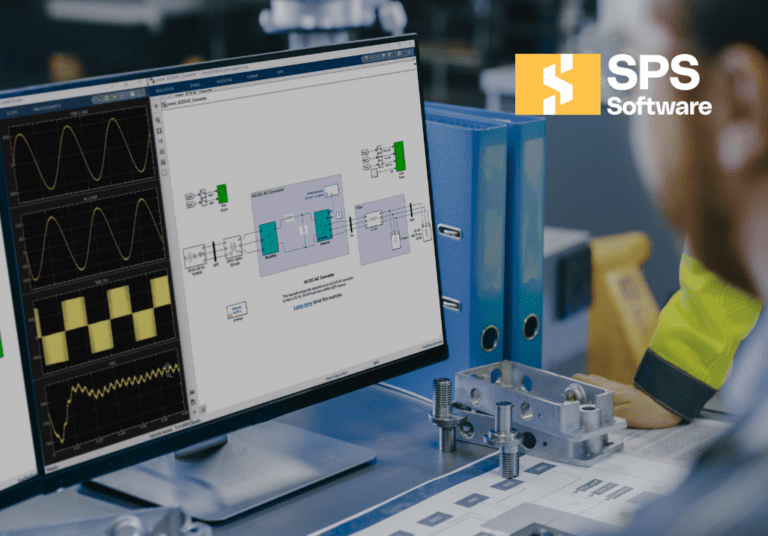
En s'appuyant sur les informations ci-dessus, SPS SOFTWARE fournit aux ingénieurs la modélisation haute fidélité dont ils ont besoin. Nous proposons des modèles de convertisseurs transparents, basés sur la physique, qui incluent l'ondulation de commutation, le temps mort et les imperfections des dispositifs. Ainsi, les ingénieurs et les étudiants qui utilisent SPS SOFTWARE peuvent régler leurs contrôleurs en fonction des formes d'onde qu'ils observeront dans la réalité. Notre approche de modèle ouvert signifie que chaque équation et chaque paramètre des dispositifs sont visibles et ajustables, afin que les utilisateurs sachent exactement comment leur système se comporte. Cela renforce la confiance dans le fait que le contrôleur fonctionnera comme prévu sur le matériel réel.
Notre plateforme s'intègre parfaitement aux flux de travail courants tels que MATLAB/Simulink, ce qui permet aux modèles de convertisseurs détaillés d'être directement transférés vers les outils de conception de contrôle. Elle aide les utilisateurs à détecter les problèmes à un stade précoce en rendant les résultats de simulation aussi proches que possible de la réalité, sans sacrifier la commodité. Le résultat est clair : les équipes d'ingénieurs gagnent du temps et de l'argent, car elles conçoivent et testent les contrôleurs sur le bon modèle dès le départ, évitant ainsi des révisions coûteuses à un stade avancé.
Les utilisateurs avancés exploitent la boîte à outils ARTEMiS en tant que solveur enfichable dans Simscape Power Systems (anciennement SimPowerSystems) pour obtenir une précision en temps réel. En pratique, il s'agit de construire le modèle électrique dans Simscape Electrical™ comme d'habitude, puis de sélectionner ARTEMiS comme solveur à pas fixe lors de l'exécution sur du matériel en temps réel. ARTEMiS complète le modèle standard en partitionnant automatiquement le réseau et en appliquant des techniques de stabilisation numérique afin que la simulation reste stable au pas de temps choisi. Les ingénieurs peuvent ainsi simuler en temps réel des systèmes électriques complexes, tels que les micro-réseaux ou les entraînements multimoteurs, sans ajouter de délais artificiels ni simplifier le modèle. En fait, ARTEMiS sert de moteur d'exécution en temps réel qui garantit que la fidélité du modèle Simscape est préservée à grande vitesse.
Les solveurs basés sur les FPGA sont devenus essentiels car les systèmes électriques modernes impliquent souvent des phénomènes qui se déroulent plus rapidement que ce que les solveurs CPU traditionnels peuvent gérer. Les dispositifs électroniques de puissance à haute fréquence, tels que les convertisseurs au carbure de silicium (SiC) ou au nitrure de gallium (GaN), commutent si rapidement que pour les simuler avec précision, il faut des pas de temps extrêmement petits. Les FPGA peuvent calculer ces petites simulations en parallèle, ce que les processeurs généraux ont du mal à faire à grande échelle. En utilisant des FPGA, les simulateurs peuvent capturer chaque transitoire rapide et chaque événement de commutation, de sorte qu'ils modélisent avec précision tous les éléments, des entraînements de moteur à grande vitesse aux circuits de protection rapides comme l'éclair. Essentiellement, les solveurs FPGA garantissent que la résolution d'une simulation est suffisamment fine pour refléter la réalité dans les cas où même des pas de l'ordre de la microseconde brouilleraient des détails importants.
Les simulations en temps réel basées uniquement sur l'unité centrale sont limitées par la nature séquentielle et la vitesse d'horloge des processeurs à usage général. Au fur et à mesure que les modèles de simulation gagnent en complexité - avec davantage de nœuds, d'éléments de commutation et de boucles de contrôle - l'unité centrale doit effectuer davantage de calculs au cours d'un même pas de temps fixe. Elle finit par atteindre un point où elle ne peut pas terminer tous les calculs avant l'échéance de l'étape suivante, ce qui entraîne des dépassements de délais ou la nécessité d'augmenter la taille du pas de temps. Les ingénieurs doivent souvent simplifier les modèles dans le cadre des contraintes imposées par l'unité centrale, par exemple en regroupant les composants ou en réduisant les vitesses de commutation, ce qui peut entraîner l'omission de comportements dynamiques critiques. En outre, certaines simulations d'électronique de puissance impliquent des équations très rigides qui sont sujettes à l'instabilité numérique sur une unité centrale, à moins que la taille du pas ne soit augmentée. Tous ces facteurs signifient qu'une approche basée uniquement sur l'unité centrale peut ne pas simuler fidèlement des systèmes extrêmement rapides ou à grande échelle, ce qui limite les scénarios que vous pouvez tester en toute confiance.
Oui, l'un des grands avantages des simulateurs avancés en temps réel est leur capacité à explorer et à prédire des conditions de défaillance rares qu'il serait difficile de recréer autrement. Comme ces simulateurs peuvent exécuter des modèles très détaillés, les ingénieurs peuvent insérer des conditions de défaillance ou des événements extrêmes dans la simulation et observer les résultats. Par exemple, un simulateur en temps réel peut modéliser ce qui se passe si un disjoncteur d'un réseau électrique ne s'ouvre pas à temps, ou comment un système d'énergie renouvelable à plusieurs onduleurs se comporte lors d'un événement d'îlotage non planifié. En accélérant ou en répétant les scénarios dans le simulateur, vous pouvez découvrir des modes de défaillance qui prendraient normalement des années d'exploitation réelle pour apparaître. Plus important encore, lorsque la simulation fonctionne en temps réel, elle peut interagir avec des dispositifs de protection ou des contrôleurs réels, révélant ainsi comment l'ensemble du système (matériel et logiciel) réagit à ces événements rares. Cette capacité de prévision aide les ingénieurs à concevoir des systèmes plus robustes et à mettre en place des mesures de protection en cas d'événements improbables mais possibles. En bref, la simulation haute fidélité en temps réel permet une approche proactive de la fiabilité, où les défaillances potentielles sont comprises et atténuées à l'avance.