Principaux enseignements
- Choisissez les détails de commutation en fonction de la décision que vous devez prendre, car les ondulations, les pics et les harmoniques ne deviennent fiables que lorsque le modèle représente réellement le comportement de commutation.
- Choisissez le pas de temps à partir du comportement le plus rapide que vous interprétez, puis vérifiez-le à l'aide de contrôles de convergence afin que la contrainte maximale, l'ondulation et les pertes ne dépendent pas de la taille du pas.
- Contrôlez la durée d'exécution grâce à des détails ciblés et un échantillonnage minutieux des sorties, car un stockage grossier ou des événements de commutation mal alignés peuvent masquer l'aliasing et créer de faux effets à basse fréquence.
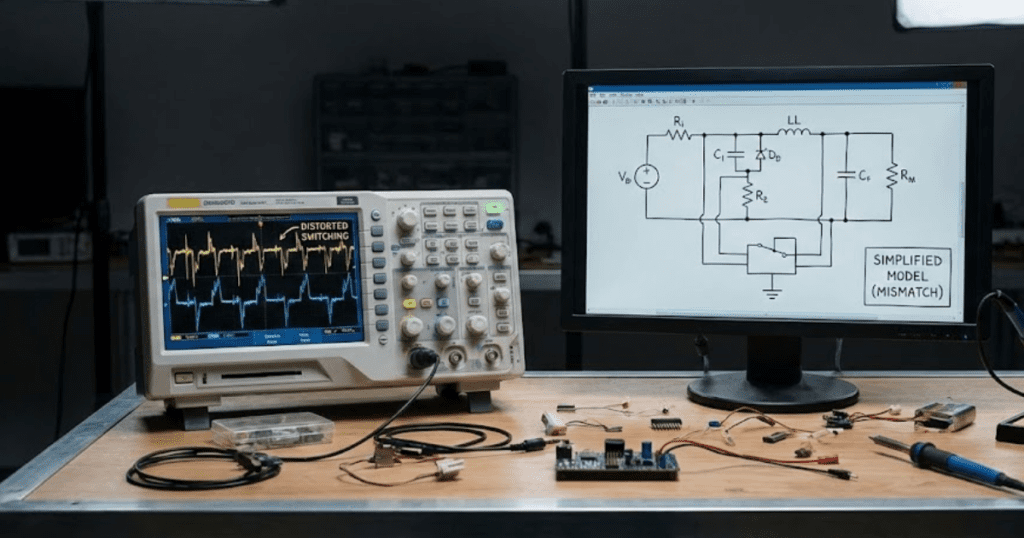
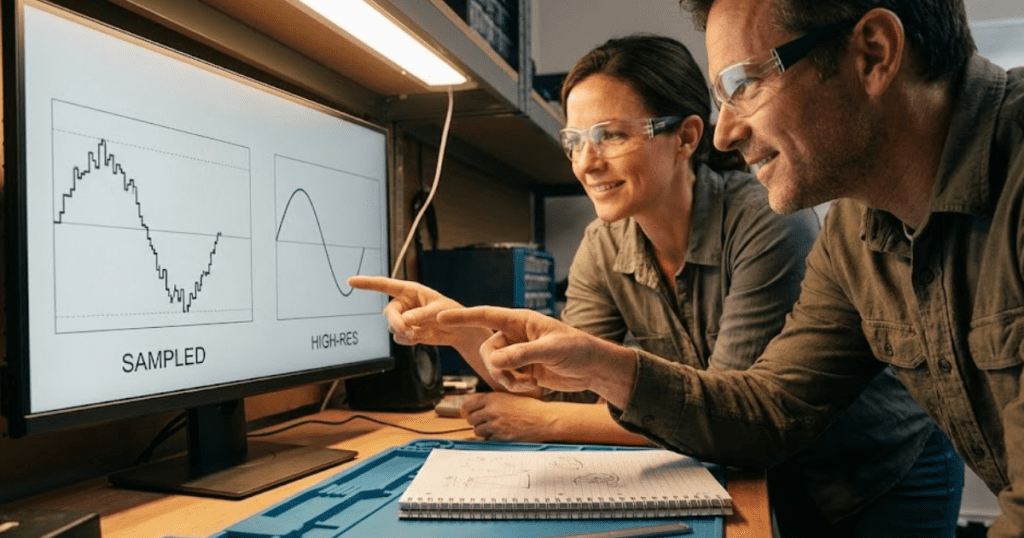
Les modèles à commutation créent les formes d'onde que vous voyez sur un banc d'essai, mais ils créent également le problème numérique le plus difficile que vous puissiez poser à un simulateur : des arêtes vives, des harmoniques à large bande et un stockage d'énergie rigide. La théorie de l'échantillonnage donne le ton ici, car pour représenter un signal sans aliasing, il faut un taux d'échantillonnage supérieur à deux fois la fréquence la plus élevée qui nous intéresse. Le choix du pas de temps correspond simplement à ce choix d'échantillonnage exprimé en secondes.
Les modèles moyens et les modèles de commutation ne sont pas des « niveaux de précision » concurrents. Ce sont des instruments différents. Les résultats les plus fiables sont obtenus en associant les détails du modèle à votre question d'étude, puis en sélectionnant un intervalle de temps qui résout le comportement le plus rapide qui vous intéresse, et non le comportement le plus rapide qui existe dans le schéma.
« La fiabilité de votre simulation de convertisseur dépendra entièrement de la précision de vos détails de commutation et de votre intervalle de temps. »
Choisissez des modèles de convertisseurs à commutation ou à moyenne en fonction des objectifs de l'étude.
Utilisez un modèle à commutation lorsque vous avez besoin d'ondulations, de pics, de contenu harmonique, de contraintes sur les dispositifs ou d'une interaction détaillée avec la protection et les parasites. Utilisez un modèle moyen lorsque vous avez besoin d'un comportement de contrôle, de points de fonctionnement en régime permanent, de transitoires lents ou d'études de système où les ondulations de commutation ne feraient que brouiller la réponse. Le bon choix est celui qui correspond à la décision que vous devez prendre.
Les modèles à commutation représentent les états discrets marche-arrêt des dispositifs à semi-conducteurs, ils produisent donc naturellement une ondulation PWM, des effets de récupération de diode et des fronts dv dt et di dt élevés. Cette fidélité est importante pour le courant d'ondulation du condensateur, l'oscillation du flux du transformateur, l'amortissement du filtre et les effets d'échantillonnage du contrôleur, car ceux-ci dépendent des formes d'onde instantanées et pas seulement de leurs moyennes. Elle est également importante chaque fois que vous avez besoin de valeurs de crête plutôt que de valeurs efficaces, car les crêtes fixent souvent les limites thermiques et de fiabilité.
Les modèles moyennés remplacent le réseau de commutation par une source contrôlée ou une relation équivalente dépendante du cycle de service. Cela supprime le contenu de la fréquence porteuse, ce qui rend généralement la simulation stable à des intervalles de temps beaucoup plus longs et vous permet d'étudier des fenêtres plus longues. Si votre objectif est l'interaction au niveau du réseau, la réponse de dérive, la séquence de démarrage ou le réglage d'une bande passante de boucle, un modèle moyenné vous donnera une réponse plus rapide avec moins de pièges numériques.
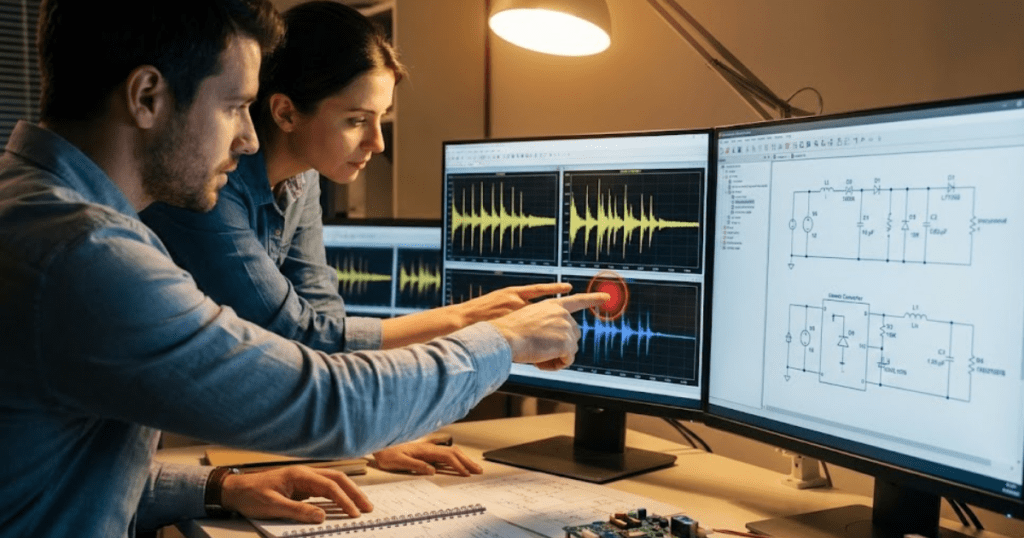
Identifier les changements de détails de commutation dans les formes d'onde clés et les pertes
Le changement de détail modifie ce que votre modèle considère comme « réel » au sens électrique : l'ondulation, les harmoniques et les contraintes de pointe deviennent des signaux explicites au lieu d'être implicites. Cela affecte directement les pertes de conduction prévues, les pertes de commutation, l'échauffement par ondulation dans les composants magnétiques et les condensateurs, ainsi que toute logique de contrôle qui dépend des courants et tensions échantillonnés. Le calcul de la moyenne supprime le porteur et remodèle ces résultats.
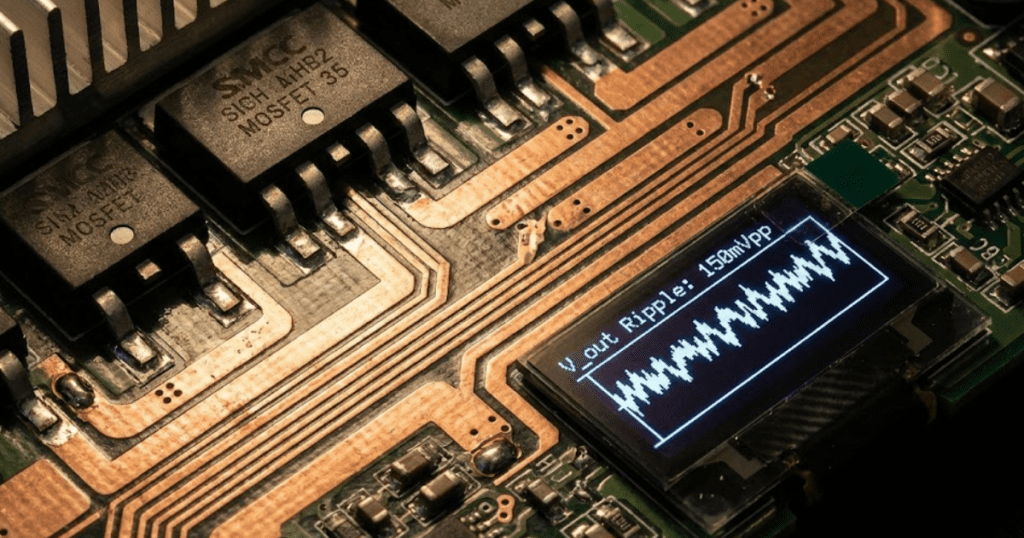
L'ondulation n'est pas un problème cosmétique. Une petite variation du courant d'ondulation peut faire passer un condensateur d'une élévation de température acceptable à une surchauffe chronique, et cette même ondulation peut exciter des résonances dans les filtres et les câbles qui n'apparaissent jamais dans un modèle moyen. Les harmoniques ont également leur importance en dehors des rapports sur la qualité de l'énergie, car les travaux de mise en conformité s'étendent souvent bien au-delà de la fréquence fondamentale et même au-delà de la fréquence de commutation à travers ses harmoniques.
Les pratiques en matière d'émissions conduites constituent un point de référence utile, car les limites de perturbation sont évaluées de 150 kHz à 30 MHz dans la norme CISPR 11. Un modèle de commutation générera un contenu qui atteint cette plage si vos bords sont suffisamment rapides ou si vos parasites sont représentés, et votre choix de pas de temps déterminera quelle partie de ce spectre est crédible. Si vous lissez les détails de commutation de manière trop agressive, vous obtiendrez toujours une forme d'onde « propre », mais elle sera propre pour de mauvaises raisons.
Définir le pas de temps de simulation à partir de la fréquence de commutation et de la bande passante de contrôle
Un pas de temps pratique commence par le comportement le plus rapide que vous devez résoudre, puis ajoute une marge afin que l'intégration numérique ne brouille pas les contours ou ne déplace pas les phases. Pour les modèles de commutation, ce comportement correspond généralement à la période de la porteuse PWM, au temps mort et à toute oscillation résonante que vous souhaitez conserver. Pour les modèles moyennés, le comportement le plus rapide correspond généralement à la bande passante de contrôle et aux pôles dominants de l'installation.
Prenons l'exemple d'un convertisseur PWM de 20 kHz où vous vous intéressez au courant d'ondulation de l'inductance et au courant de crête du commutateur pendant les transitoires. La période de commutation est de 50 µs, donc un pas de temps d'environ 0,5 µs donne 100 points par période et capture généralement la forme de l'ondulation sans transformer chaque bord en un escalier. Si votre modèle comprend un temps mort de 200 ns ou quelques MHz d'oscillation que vous souhaitez observer, ce pas de temps n'est plus adéquat et doit être réduit jusqu'à ce que ces caractéristiques cessent de se déplacer à mesure que vous l'affinez.
Le contrôle ajoute une deuxième contrainte. Un contrôleur numérique avec une bande passante à l'échelle kHz peut sembler stable avec un pas de temps grossier, mais présenter tout de même une marge de phase incorrecte une fois que les délais d'échantillonnage et de modulation sont représentés. Le flux de travail le plus sûr consiste à lier le pas de temps à la fréquence la plus élevée que vous interprétez dans les graphiques ou les mesures, puis à vérifier la convergence en divisant par deux le pas de temps et en vérifiant si les résultats clés, tels que l'amplitude d'ondulation et le courant de crête du dispositif, se stabilisent à une valeur cohérente.
| Ce dont vous avez besoin dans la simulation | Détail du modèle qui répond à ce besoin | Point de contrôle temporel qui garantit la crédibilité des résultats |
| Réglage de boucle et transitoires lents sur plusieurs secondes | Convertisseur à moyenne avec commande explicite et limites | Le pas de temps résout la bande passante de contrôle et la dynamique dominante de l'installation, et non la porteuse PWM. |
| Courant ondulatoire, contrainte de crête et structure harmonique | Modèle de commutation avec PWM et états des dispositifs | Timestep fournit de nombreux points par période de commutation, de sorte que l'ondulation et les pics cessent de se déplacer lorsqu'ils sont affinés. |
| Synchronisation de la protection et franchissements de seuils | Modèle de commutation si les seuils dépendent de l'ondulation instantanée | Le pas de temps est suffisamment petit pour que les événements seuils se produisent à des moments cohérents tout au long des raffinements. |
| Résonance du filtre et interaction des câbles | Commutation ou moyenne en fonction de la fréquence de résonance d'intérêt | Timestep détermine la fréquence de résonance avec une précision de phase confortable, et pas seulement l'amplitude. |
| Comptabilité énergétique et comptabilité des pertes que vous utiliserez pour les contrôles thermiques | Modèle de commutation si les pertes dépendent de l'ondulation et du timing des fronts | Le pas de temps est suffisamment court pour que la perte intégrée par cycle converge et ne dérive pas avec la taille du pas. |
Utilisez des contrôles de stabilité numérique pour confirmer que le pas de temps est suffisamment petit.
Un pas de temps est « suffisamment petit » lorsque vos résultats convergent et que le solveur reste stable sans amortissement artificiel. La convergence signifie que les valeurs qui vous intéressent changent de manière négligeable lorsque vous divisez le pas de temps par deux, et non que les formes d'onde semblent lisses. La stabilité signifie que l'énergie n'augmente pas sans raison physique et que les oscillations correspondent à la physique du circuit plutôt qu'à des artefacts numériques.
Commencez par deux vérifications rapides : exécutez le même cas avec un pas de temps plus petit et comparez un petit ensemble de mesures, puis recherchez les comportements non physiques tels que les pertes négatives, les oscillations qui n'apparaissent qu'à une seule taille de pas ou les oscillations qui changent de fréquence à mesure que vous affinez. Les pics sont souvent les premiers à bouger lorsque le pas de temps est trop grand, car ils peuvent être coupés ou décalés dans le temps sans avertissement évident. Lorsque vous constatez une instabilité, considérez-la comme un signal de modélisation, car l'inductance parasite, les commutateurs idéaux et les actions de contrôle rigides peuvent rendre le système numériquement difficile, même si la topologie est correcte.
Les outils sont utiles lorsqu'ils restent transparents. SPS SOFTWARE prend en charge les modèles de composants ouverts et modifiables, ce qui vous permet d'inspecter les équations, d'identifier les éléments rigides et de décider s'il convient d'ajouter un amortissement pratique, d'affiner les parasites ou de réduire le pas de temps autour des parties du réseau qui créent les dynamiques les plus rapides. Ce flux de travail tend à être plus efficace que la méthode par essais et erreurs, car vous apprenez quelles lois physiques ont créé le problème numérique.
Équilibrez la durée d'exécution et la précision grâce à l'affinement local et à la gestion des événements.
Le contrôle de la durée d'exécution consiste à appliquer une résolution là où cela est nécessaire et à la réduire là où cela n'est pas nécessaire. Les transitions de commutation et les résonances à haute fréquence nécessitent des pas de temps courts, mais de nombreuses parties d'un modèle de système d'alimentation évoluent lentement. Une configuration équilibrée concentre une résolution fine autour des convertisseurs et des nœuds sensibles, puis utilise une résolution plus grossière ailleurs lorsque le simulateur le permet.
Le raffinement local est plus efficace lorsqu'il correspond à un besoin de mesure. Si vous vous intéressez uniquement à la distorsion de la tension du réseau au point de couplage commun, vous pouvez conserver les détails de commutation à l'intérieur du convertisseur et utiliser des détails réduits ou une agrégation sur les alimentations distantes. Si vous vous intéressez à la contrainte exercée sur les appareils, vous conservez les détails à proximité des appareils et évitez de consacrer du temps de calcul à la dynamique du champ lointain qui n'influencera pas les pics au cours d'une période de commutation.
La gestion des événements est importante car la commutation est discontinue. Si votre simulateur modélise explicitement les événements de déclenchement, vous souhaitez que ces événements se produisent à des moments cohérents, sinon votre cycle de service dépendra du pas de temps. Si votre simulateur utilise un pas adaptatif, vous avez tout de même besoin de garde-fous afin que le pas ne devienne pas trop grand pendant un intervalle où l'ondulation est interprétée. L'objectif n'est pas une « exécution rapide », mais une exécution où chaque seconde de calcul produit des informations que vous pouvez défendre.
« La pratique la plus défendable consiste à noter ce que vous devez mesurer, puis à prouver que votre pas de temps peut le mesurer. »
Évitez les erreurs courantes liées aux pas de temps qui masquent les ondulations et l'aliasing.
La plupart des mauvais résultats obtenus avec les convertisseurs proviennent de quelques erreurs répétitives qui donnent l'impression que les courbes sont raisonnables alors que les paramètres clés dérivent. L'aliasing est le plus dangereux, car il transforme le contenu à haute fréquence en artefacts à basse fréquence qui ressemblent à des problèmes de contrôle ou à de la résonance. Une configuration rigoureuse traite le pas de temps, l'échantillonnage de sortie et la logique de commutation comme un seul et même système.
- Choisir un pas de temps qui donne trop peu de points par période de commutation, puis se fier à l'amplitude d'ondulation et au courant de crête.
- Enregistrement de formes d'onde à un intervalle de sortie grossier qui transforme l'ondulation de commutation en fausses oscillations à basse fréquence.
- Utilisation de commutateurs idéaux sans parasites, puis compensation par un pas de temps excessivement grand qui agit comme un amortissement caché.
- Permettre aux événements de commutation de se produire entre les intervalles de temps afin que les cycles de service effectifs changent avec la taille des pas.
- Valider uniquement les valeurs moyennes, puis passer à côté du fait que les pics et les pertes n'ont pas convergé.
Cette preuve peut être simple, comme réduire de moitié le pas de temps jusqu'à ce que les valeurs maximales, l'ondulation et la perte intégrée cessent d'évoluer de manière significative. Après avoir répété cette opération plusieurs fois, vous commencerez à repérer les cas où un modèle est trop détaillé pour l'objectif de l'étude ou trop moyen pour étayer une décision relative au matériel.
Le logiciel SPS SOFTWARE est idéal lorsque vous considérez la modélisation comme une discipline d'ingénierie et non comme une boîte noire. Les modèles transparents permettent d'expliquer plus facilement pourquoi vous avez choisi un modèle de commutation, pourquoi vous avez sélectionné un pas de temps et pourquoi les résultats resteront valables lorsque quelqu'un vous demandera ce qui a changé lorsque la taille du pas a été modifiée. C'est cette habitude qui fait passer la simulation du convertisseur de « semble correct » à « est suffisamment correct pour agir ».