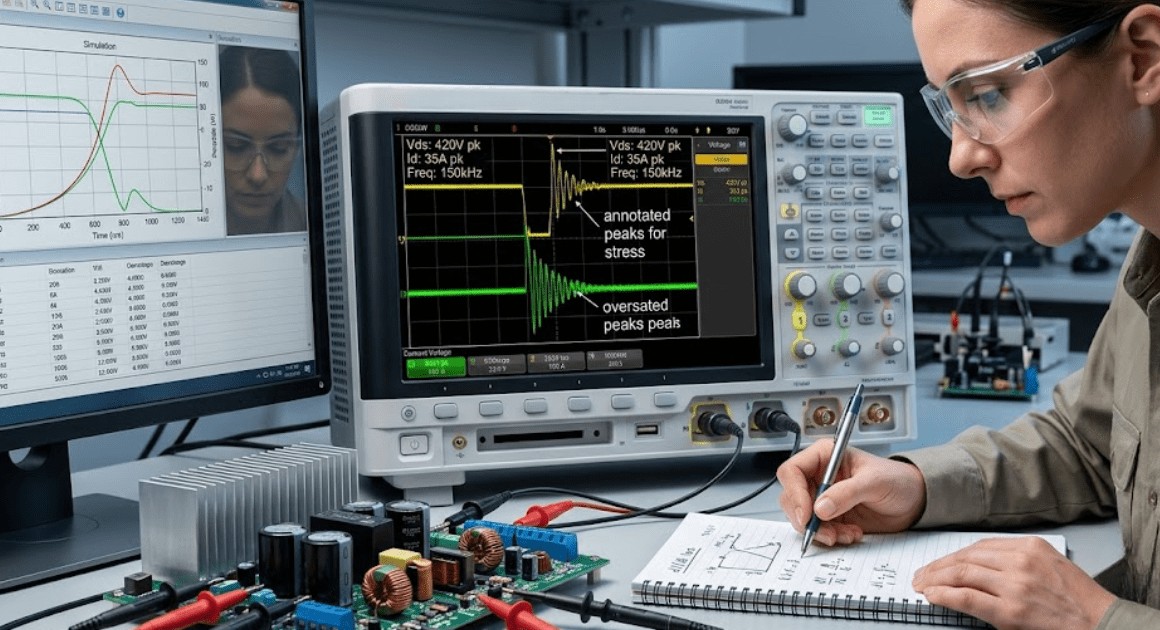
Guide expliquant ce que mesure un test à double impulsion, comment mettre en place une simulation et comment estimer l'énergie de commutation avant de passer au matériel de banc d'essai.



Guide expliquant ce que mesure un test à double impulsion, comment mettre en place une simulation et comment estimer l'énergie de commutation avant de passer au matériel de banc d'essai.
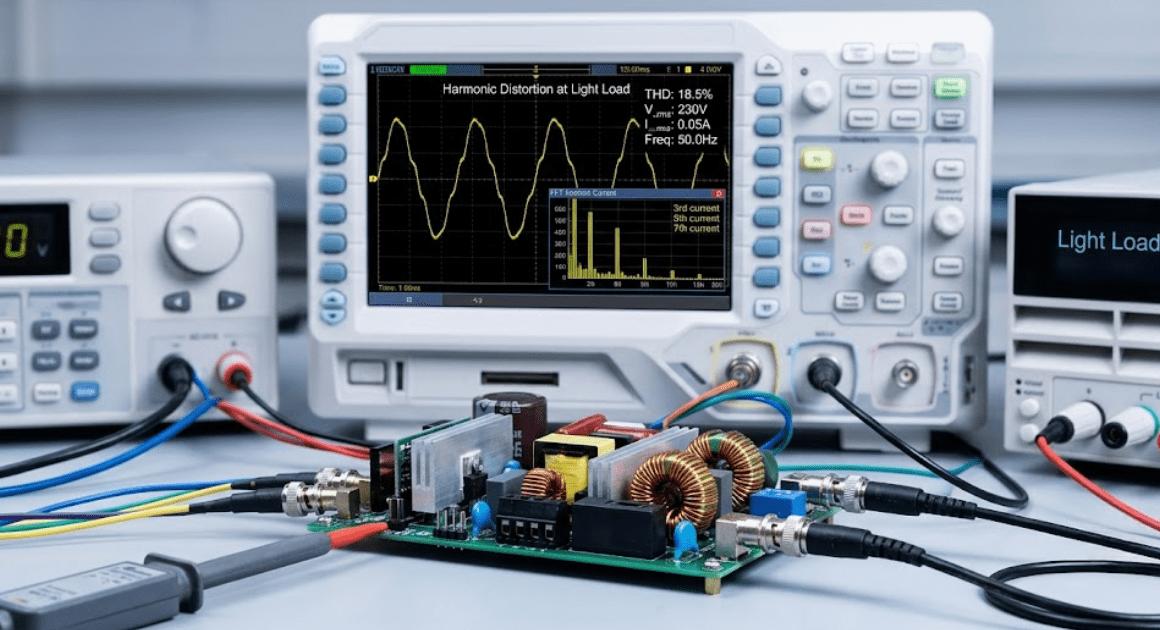
Ce guide explique comment effectuer une analyse harmonique et une analyse de la qualité de l'énergie dans le cadre d'une simulation en domaine temporel, modéliser des charges non linéaires, calculer la distorsion harmonique totale et vérifier les limites au niveau des barrages concernés.
Ce guide présente six contrôles par simulation qui aident les ingénieurs à tester la stabilité de régulation, la réponse au démarrage et la distorsion harmonique des étages de correction du facteur de puissance avant de procéder aux essais sur matériel.
L'analyse de la ferrorésonance dans les transformateurs et les réseaux de distribution permet de comprendre les déclencheurs de commutation, les mécanismes de surtension, la configuration de simulation, les effets de la mise à la terre et les mesures de prévention.

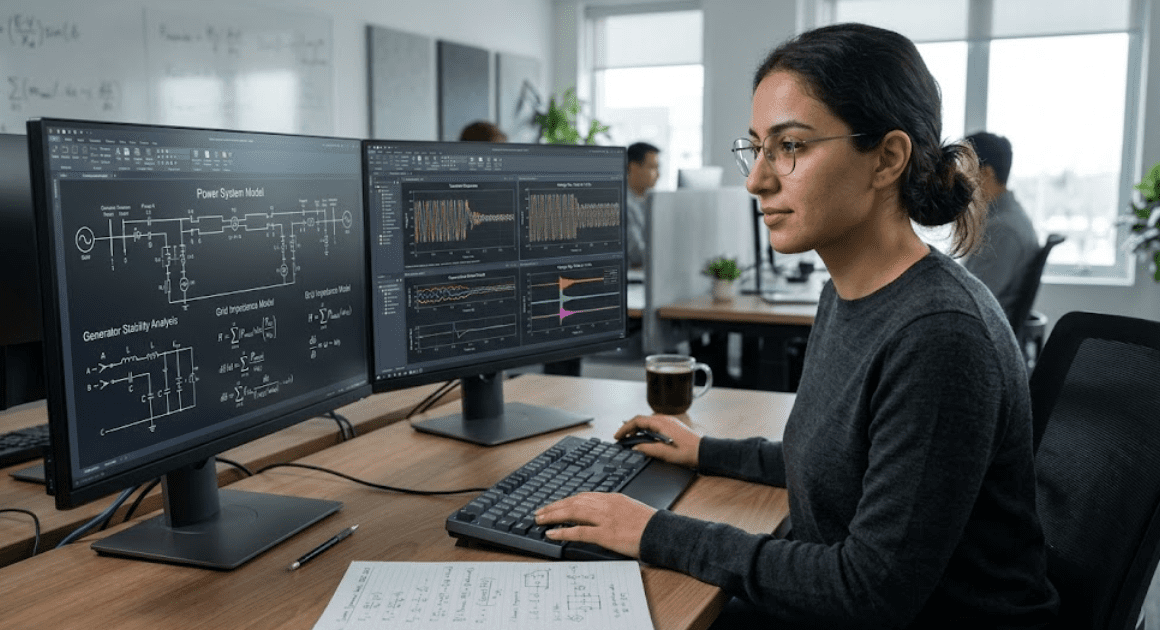
Cet article explique comment modéliser un système de stockage d'énergie par batterie dans le cadre d'études sur le soutien au réseau, en accordant une attention particulière aux limites d'état de charge, aux commandes des onduleurs, à la logique de l'installation et à la réponse en cas de défaut.
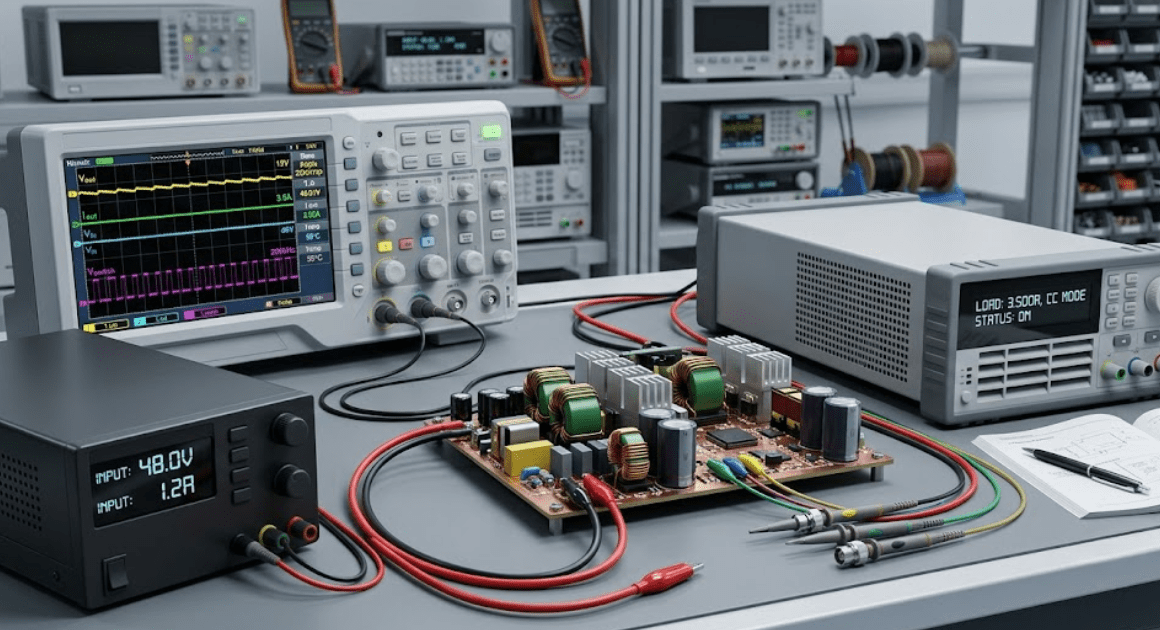
Ce guide explique comment valider un prototype de convertisseur de puissance à l'aide de la simulation, des conditions de fonctionnement limites, des vérifications de contrôle, de l'analyse thermique, des études de défaillance et d'une liste de contrôle préalable à la mise en place du matériel, avant de procéder aux essais en laboratoire.
Guide pratique pour le choix d'un logiciel de simulation EMT et d'un logiciel d'analyse des réseaux électriques pour les transitoires, en fonction de la visibilité du solveur, de l'ouverture du modèle, du contrôle du pas de temps, de l'initialisation, de l'accès aux données et de l'adéquation au flux de travail.
Cet article explique comment modéliser le comportement des parafoudres, simuler les transitoires liés à la foudre et aux opérations de commutation, et vérifier la couverture de protection et la charge énergétique au sein d'un poste électrique.

