Key Takeaways
- STATCOM sizing will be accurate only when the target is tied to a disturbance and a voltage recovery requirement.
- Weak-grid studies should centre on short-circuit strength, control limits, and post-fault recovery instead of steady state MVAr alone.
- Transparent FACTS models give you a defensible path from initial compensation estimates to final control settings.
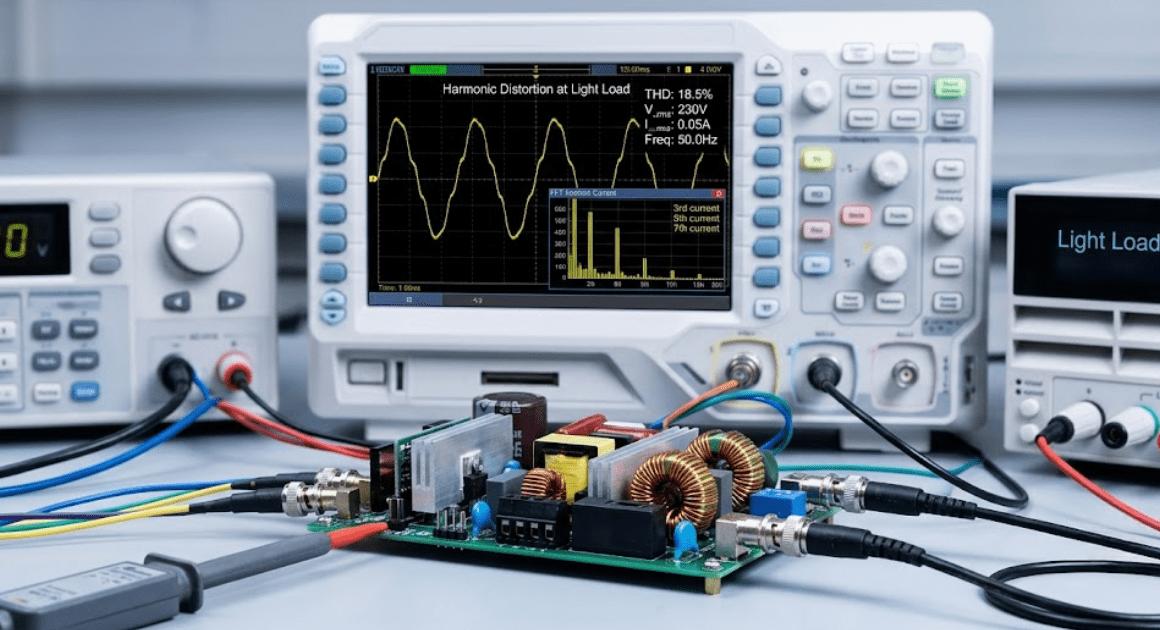
Reactive power compensation should be sized against disturbance duty, not only steady-state MVAr.
Steady state studies will tell you how much reactive support a bus needs at one operating point, but they won’t tell you if the device can hold voltage through a fault, a plant ramp, or a control interaction. That gap matters more now because renewable capacity additions reached almost 510 GW in 2023, with solar photovoltaic leading the increase. More inverter-based connections mean more sites where voltage support must be checked in motion, not as a single snapshot.
“A good STATCOM study starts from the disturbance you expect the grid to survive and works back to the current, control limits, and recovery target you need.”
That approach gives you a compensation rating tied to voltage behaviour, fault ride through, and plant control interactions. It also gives you a model you can trust when the grid is weak and the margin for error is small.
FACTS devices support voltage control in stressed networks
FACTS devices are used to control voltage, reactive power flow, and transfer capability when the network cannot hold acceptable voltage on its own. A STATCOM is one member of that group, and it is often selected when the grid is weak, the voltage swings are steep, or the response must stay effective during a disturbance.
A long collector system feeding a remote substation is a clear example. The bus can sit within limits at normal output, then fall sharply when a nearby fault is cleared or when a large motor starts. A fixed capacitor will only supply a fixed amount of reactive power, and an on-load tap changer will move too slowly. A controlled shunt device can react on the timescale that the voltage problem appears.
You should treat the device class as a control function first and an MVAr nameplate second. That framing keeps you focused on the reason the equipment is being installed. If the site problem is post-fault voltage recovery, the useful comparison is response quality under stress, not only the steady state reactive requirement at rated voltage.
STATCOM sizing starts with the voltage control target
A STATCOM should be sized from a voltage target tied to a specific operating event. You need to define the bus, the acceptable minimum voltage, the duration of the dip, and the recovery time. Those values turn a vague reactive requirement into a current and control problem you can actually test.
A point of interconnection at 132 kV shows the method well. If your plant must hold the bus above 0.92 pu during a three-phase fault recovery and return to 0.98 pu within a few hundred milliseconds, the STATCOM rating has to support that path. A load flow result that says the bus needs 35 MVAr at nominal conditions does not answer that operating target.
You’ll also need to decide what is being protected. Some projects are built around a grid code voltage envelope. Others are built around feeder motor performance, converter stability, or plant controller margins. Once the target is explicit, the rating study becomes disciplined. Without that target, the chosen size will reflect convenience more than system behaviour.
Weak grid strength sets the useful MVAr range
Grid strength sets how much benefit each extra MVAr will actually deliver. A weak grid will show large voltage movement for a modest current injection, but it will also expose control interaction, current saturation, and poor recovery if the device is undersized. Useful sizing comes from the system short-circuit level, not only the reactive requirement.
Connections based on inverter-heavy generation make this more common. Solar and battery storage account for 81% of new U.S. utility-scale generating capacity expected in 2024. A site with low short-circuit strength and a long export line will often need a STATCOM sized for fault recovery current, even if the normal reactive requirement looks modest.
A wind or solar plant tied into a remote bus can illustrate the trap. The bus may regulate well at 20 MVAr during normal export, yet need 60 MVAr worth of controlled current support once a fault is cleared and converter controls re-synchronise. That is why weak-grid studies should treat short-circuit strength as the main sizing frame, then refine the range with operating cases.
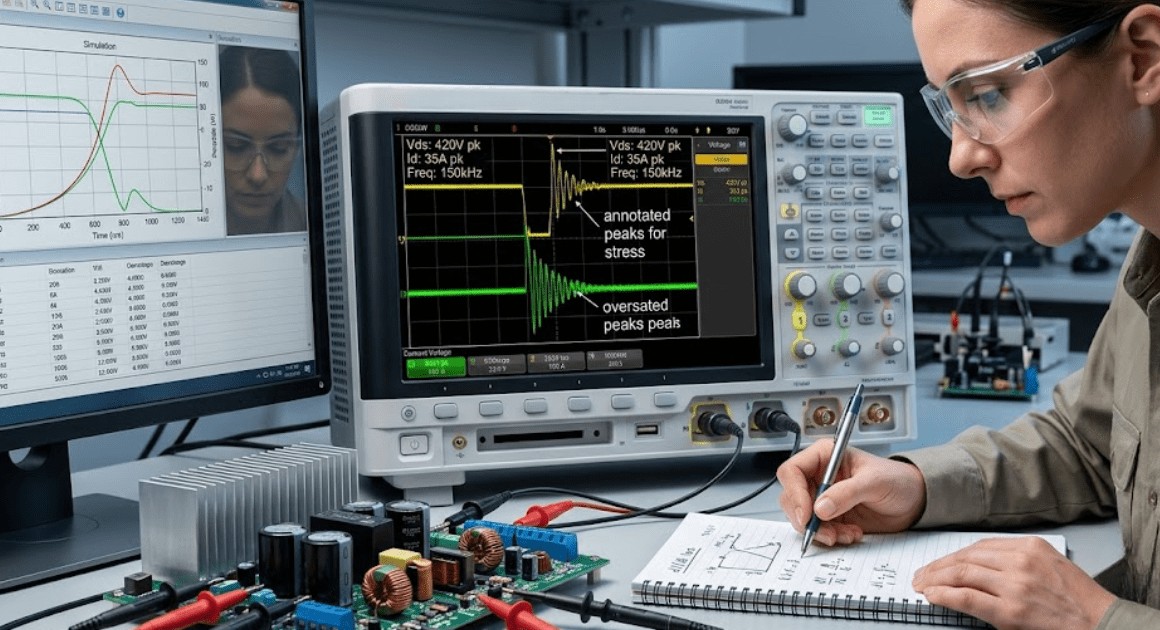
Control limits shape the STATCOM dynamic response
The STATCOM dynamic response is shaped by current limits, control gains, voltage measurement filtering, and protection thresholds. Those elements decide how much reactive current is actually available during a dip and how cleanly the device returns to normal control after the event. Nameplate MVAr alone will not tell you that behaviour.
A practical case is a controller tuned for very tight voltage regulation on a bus with noisy measurements. If the filter is too light, the converter can chase small voltage swings and hit its current ceiling before the severe event arrives. If the filter is too heavy, the response comes late and the bus falls deeper than expected. Both cases can happen with the same MVAr rating.
You should also check the control priority during current saturation. Some models prioritise reactive current first, while others share current between active and reactive components. That choice matters at renewable interconnections where plant-level controls are also acting. A clean study records the current ceiling, the voltage regulator limits, and the recovery logic so you can see what the converter will actually do.
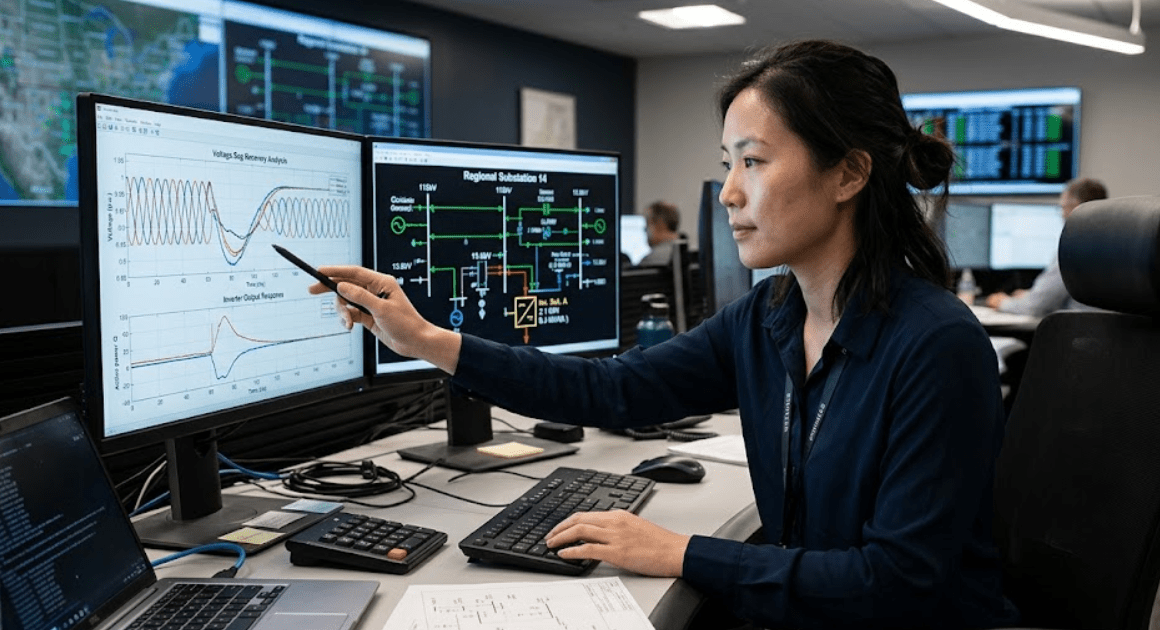
Simulation should reproduce the full disturbance sequence
Reactive power compensation simulation should reproduce the full event sequence from pre-fault conditions to post-fault recovery. A useful model includes the network, the device controls, the plant controls, and the switching actions that occur around the disturbance. If one piece is missing, the voltage result will look cleaner than the site will.
A fault on a nearby line is a simple example. The bus voltage drops, the STATCOM pushes reactive current, breakers clear the fault, plant converters recover, and tap changers or capacitor steps react later. A model built in SPS SOFTWARE lets you inspect each controller and test that sequence with transparent parameters instead of hiding the behaviour inside a black box.
- Pre-fault operating point at the studied export or import level
- Fault type, duration, and clearing order at the correct buses
- Current limits and protection thresholds inside the device controls
- Plant or feeder controls that react during recovery
- Post-fault voltage recovery criteria that match the project requirement
If you can’t reproduce the sequence, you can’t trust the rating. The most common sizing errors appear after the fault is gone, when devices hit limits, controls interact, and voltage takes longer to recover than the steady state study suggested
STATCOM versus SVC under deep voltage dips
The main difference between a STATCOM and an SVC is how well reactive support holds up as voltage falls. A STATCOM is current-based, so it keeps stronger support at low voltage. An SVC depends more heavily on system voltage, so its effective reactive output drops more sharply during deep dips.
A transmission bus exposed to severe fault dips shows the contrast clearly. The SVC can regulate well during normal operation and mild disturbances, yet it loses strength when the voltage falls to the point where support is needed most. The STATCOM usually gives you better low-voltage support and cleaner recovery, though its converter controls still need proper tuning and current limits.
| When you compare these devices | What you should expect in service |
| A deep voltage dip reduces the available bus voltage. | A STATCOM will usually keep stronger reactive current than an SVC during the same dip. |
| A site needs support during the first moments after fault clearing. | A STATCOM will usually recover the bus more firmly because its control action is less tied to bus voltage. |
| A bus sees routine voltage regulation without severe disturbances. | An SVC can still be a suitable choice if the normal operating range is the main concern. |
| A weak grid exposes interaction between compensation and plant controls. | A STATCOM will usually give you more tuning flexibility for that control problem. |
| A project team compares only steady state MVAr ratings. | The comparison will miss the low-voltage performance difference that often decides the final outcome. |
Load flow snapshots miss the worst compensation duty
Load flow snapshots miss the worst compensation duty because they solve a settled operating point after transients are gone. They are useful for initial screening, bus placement, and normal operating range, but they will not show current saturation, control interaction, or delayed voltage recovery during a disturbance.
A collector station can make this obvious. The steady-state case might show a 25 MVAr shortage at peak export, which suggests a modest device rating. The fault study can show the bus needs the equivalent of 70 MVAr worth of reactive current support for a short interval to stay above the plant trip threshold. Both results are true, but they describe different duties.
“You should use load flow to frame the starting point, then let disturbance studies set the final size.”
That order prevents a common mistake: selecting compensation from a tidy bus voltage report and finding later that the device can’t hold the bus through the event that actually matters.
Transparent control models improve confidence in final settings
Transparent control models improve confidence because you can see how the compensation will behave before you commit to final settings. That visibility matters more than another decimal place in the steady state result. Final tuning depends on filters, limits, and recovery logic that need inspection, not assumption.
A utility interconnection study often passes through several revisions as fault levels, export limits, and plant controls are updated. Open models let you adjust the voltage regulator, current ceiling, or measurement filter and check the effect without losing track of the physical meaning. That is why engineers working in SPS SOFTWARE can test compensation against disturbance behaviour instead of trusting a single load flow snapshot.
You’ll make better settings when the model tells you why the voltage recovers cleanly or why it doesn’t. A final rating chosen that way is easier to defend in design review and easier to teach to the next engineer who inherits the study. SPS SOFTWARE fits that closing step well because the model stays visible, editable, and tied to the system behaviour you’re trying to control.