Key Takeaways
-
- Real-time simulation is most useful when hardware response and system timing must be validated in the same loop.
-
- Model detail should match the test objective, with EMT fidelity reserved for cases where switching and control transients shape the result.
-
- Reliable protection validation depends on repeatable faults, stable interfaces, and hardware chosen for the actual latency target.
Real-time simulation gives you a way to test power system behaviour against actual clock time before you place new settings, controls, or hardware into service.
Validation matters because field errors are expensive and hard to isolate once equipment is installed. U.S. electricity customers averaged 5.5 hours of power interruptions in 2022, the longest annual outage duration reported since 2013. That doesn’t mean simulation prevents every outage, but it does mean testing quality has practical value when protection, control, and equipment timing all interact. You need methods that expose timing faults before a relay trips late, a controller saturates, or a breaker command arrives after the event has already moved on.
Real-time simulation runs your model at wall clock speed
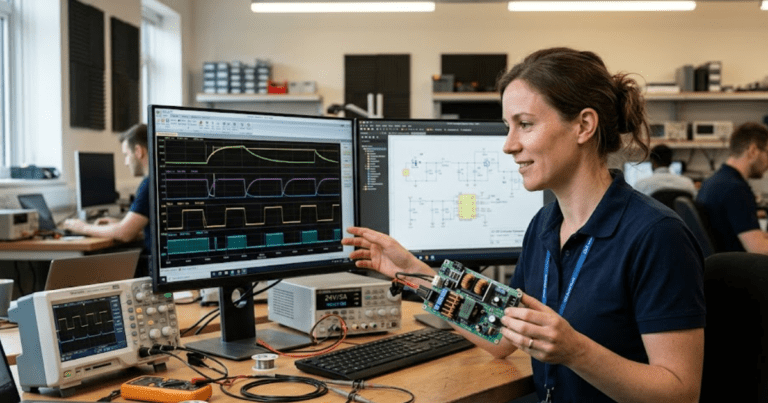
Real-time simulation solves a power system model in the same time that the physical system would take to unfold. Each time step finishes before the next one is due, so voltages, currents, logic states, and outputs stay synchronized with clock time and can interact with external hardware.
A simple feeder fault test shows why that matters. A relay under test can receive analogue current signals from the simulator, measure an overcurrent pickup, and issue a trip command that returns to the simulated breaker model without time distortion. You aren’t just observing a waveform after the run is finished. You are testing an active loop where the simulated system and physical device affect each other step by step.
That timing requirement is what separates real-time simulation from a standard transient study on a workstation. Offline studies can run faster or slower than clock time and still produce useful plots. Real-time work can’t slip like that. If one step takes too long, the loop breaks, and your electrical testing result stops representing a physical sequence you can trust.
“Strong testing comes from clear models, controlled interfaces, and repeatable disturbance design.”
Closed-loop testing works only when timing stays deterministic
Closed-loop electrical testing depends on deterministic timing, which means every solve step, input update, and output response occurs within a known and repeatable time budget. Without that consistency, a good relay can look bad, a stable controller can look unstable, and your validation result will drift from the actual device behaviour.
Consider a distance relay test on a transmission line model. The simulator sends secondary currents and voltages to an amplifier, the relay estimates impedance, and the trip output returns through digital I/O to open the simulated breaker. That chain only works if signal generation, communication, and logic execution stay bounded within a fixed latency. A few microseconds of variation might be acceptable in one setup, while the same variation will distort a fast converter protection test.
Deterministic timing also improves repeatability across test sessions. You can rerun the same phase-to-ground fault with the same inception angle and compare device responses without arguing about hidden software delays. That is why timing discipline matters as much as model accuracy when you use real-time simulation for validation.
Offline simulation still fits studies that need more detail
The main difference between offline and real-time simulation is that offline studies prioritize model depth and run flexibility, while real-time studies prioritize deterministic execution. You should keep using offline simulation when the question needs long simulations, many parameter sweeps, or detail that will not fit within a strict time step budget.
A long cable energization study is a good example. You might want very fine frequency-dependent line data, detailed surge arrester behaviour, and several switching cases across many system conditions. That work fits offline simulation because you can accept slower runs in exchange for more model richness. A teaching lab that compares ten controller tuning sets across the same microgrid also benefits from offline execution because the goal is to build insight without hardware interaction.
Selection gets easier when you frame it around the validation question rather than the tool category. If you need hardware-in-the-loop, timing wins. If you need exhaustive sensitivity work, offline methods stay stronger.
| Study need | Better fit | Why that choice holds up |
|---|---|---|
| Testing a physical relay against a live fault sequence | Real-time simulation | The device must react to signals that arrive on a strict clock so the trip path remains credible. |
| Running dozens of parameter sweeps on one network model | Offline simulation | You gain more from flexible run time and automated variation than from hardware synchronization. |
| Checking controller timing with analogue and digital I/O | Real-time simulation | Closed-loop response only means something when the simulator keeps pace with the device. |
| Studying a larger network with heavy detail and long duration | Offline simulation | The model can use smaller steps or more components without a hard execution deadline. |
| Training students on fault sequences and relay logic | Depends on the teaching goal | Offline work suits concept building, while real-time work suits laboratory interaction with equipment. |
| Validating protection settings before field commissioning | Real-time simulation | Repeatable timing shows how the actual device will react under controlled fault conditions. |
Model fidelity must match the question you need answered
Model fidelity should be set by the test objective instead of a general preference for more detail. A useful model captures the dynamics that affect the device under test and leaves out detail that consumes time step budget without changing the answer you need.
A feeder relay validation does not require the same network representation as a converter gate timing study. For a relay pickup test, you usually care about source strength, line impedance, instrument transformer scaling, and fault type. For a converter protection test, switching states, control delays, and filter dynamics can dominate the outcome. Keeping both models equally detailed would waste effort and could make one of them unusable in real time.
You will get better results if you state the pass or fail condition first. If the goal is breaker trip timing, preserve event timing paths. If the goal is current waveform shape at a relay input, preserve signal content that the relay algorithm actually uses. Extra detail feels safe, but it often hides the parts that matter most during validation.
Electromagnetic transient detail matters for switching based tests
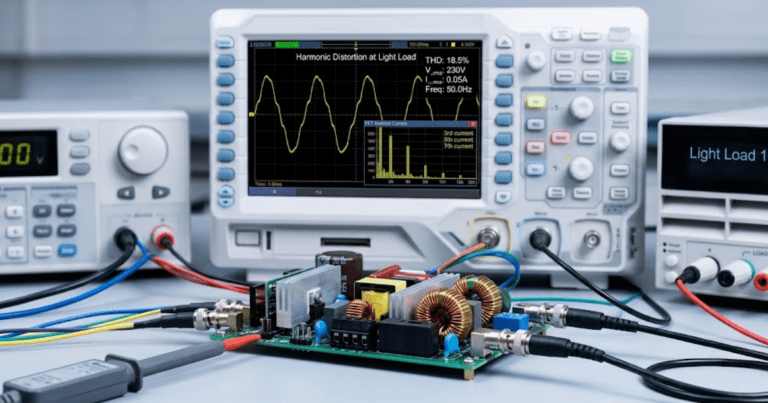
Electromagnetic transient detail matters when the device under test responds to sub-cycle events, switching edges, converter controls, or sharp waveform distortion. In those cases, an electromagnetic transient program or EMT model captures behaviour that a slower phasor or averaged representation will smooth out and misstate.
Grid conditions make that level of detail more important than many teams expect. Wind and solar supplied 13.4% of global electricity in 2023. That share puts more inverter-based behaviour into studies where fault current, control saturation, and switching interactions shape what protection sees. A grid-following inverter ride-through test will fail if your model removes the control loops that produce the current limit and phase response the relay must measure.
EMT detail is still a means to an end. You don’t need it for every study, and you can’t keep full switching detail everywhere in a real-time setup. The useful move is to preserve transient behaviour in the zones that affect the test result, then reduce less sensitive parts of the network so the model still solves on time.
Preparation starts with fixed time steps plus stable interfaces
Preparing a model for real-time power system testing starts with a fixed-step formulation, stable numerical behaviour, and clear I/O boundaries. If your offline model depends on variable-step solvers, hidden algebraic loops, or loosely defined signal scaling, it will not move cleanly into a deterministic test setup.
A practical workflow starts with the parts that break execution first. Protection engineers often discover that a model which looks fine offline becomes unstable once analogue outputs, sampled values, or breaker feedback are added. Teams using SPS SOFTWARE for physics-based offline modelling often keep the original equations visible during this stage, then reduce only the parts that do not affect the hardware test objective. That makes it easier to see what changed and why.
-
- Lock the model to a fixed time step that the target can meet every cycle.
-
- Remove algebraic loops that create execution stalls or unstable iteration.
-
- Scale analogue and digital I/O so devices see realistic signal levels.
-
- Replace unnecessary detail with reduced equivalents outside the test boundary.
-
- Verify initial conditions so the run starts from a stable operating point.
Good preparation saves more time than late troubleshooting. You will spend less effort chasing false trips, missed pickups, and unexplained numerical faults when the model enters the bench in a stable, bounded form.
Hardware needs follow the latency target of your test
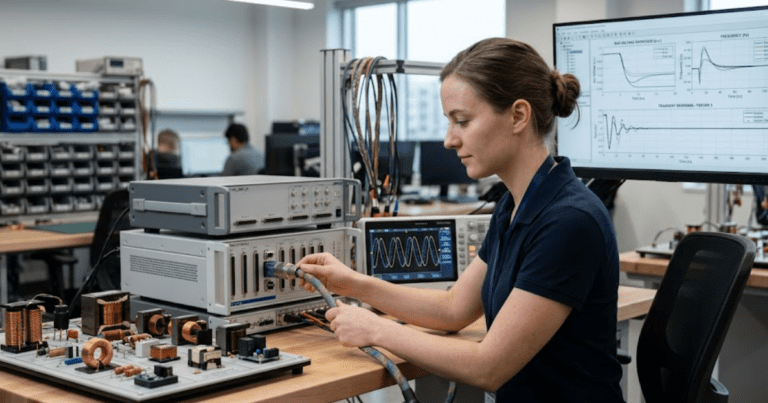
Hardware selection should follow the latency and interface requirements of the test, because the simulator alone does not define the result. You need enough processing performance, the right I/O types, and signal conditioning that preserves timing from the solver to the physical device and back again.
A protection bench for secondary injection usually includes a real-time target, analogue outputs, digital status I/O, and an amplifier that reproduces voltage and current levels seen by the relay. A power electronics bench can add faster digital interfaces, gate signal exchange, or dedicated processing hardware for very short time steps. If your test includes travelling wave logic or converter switching states, you will need much tighter latency control than you would for a basic feeder overcurrent test.
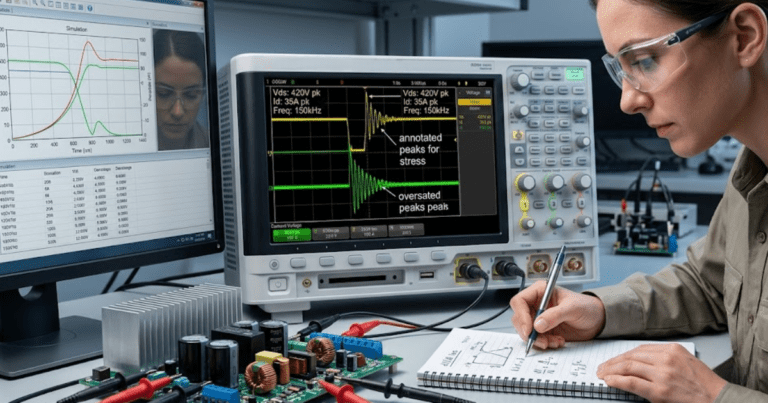
You should also budget for measurement and verification tools. An oscilloscope, event recorder, or synchronized timestamp capture will tell you if the bench timing matches your assumptions. Hardware choices look similar on a parts list, but they are not interchangeable once your acceptance criterion depends on microsecond-scale sequence accuracy.
“Without that consistency, a good relay can look bad, a stable controller can look unstable, and your validation result will drift from the actual device behaviour.”
Protection testing gains accuracy when faults stay repeatable
Protection testing becomes more accurate when each fault case is repeatable in timing, magnitude, and topology. Real-time simulation gives you that repeatability while keeping the relay, controller, or intelligent electronic device in an active loop, so you can verify settings against the same disturbance again and again until the response is defensible.
A feeder relay coordination check shows the payoff clearly. You can apply the same close-in fault at the same inception angle, vary source strength in controlled steps, and record where the relay picks up, times out, and trips. That process exposes blind spots that field event records often hide, such as a directional element that misclassifies a weak infeed case or a breaker failure timer that starts from the wrong input state. You’re no longer guessing from one messy disturbance record. You are testing a defined sequence until the cause of each response is plain.
That discipline is what turns simulation into validation. SPS SOFTWARE fits that broader workflow on the modelling side, where transparent offline system models help you understand behaviour before you commit a reduced representation to a separate real-time bench. Strong testing comes from clear models, controlled interfaces, and repeatable disturbance design. When those pieces are in place, your settings review stops being a paperwork exercise and starts acting like engineering proof.