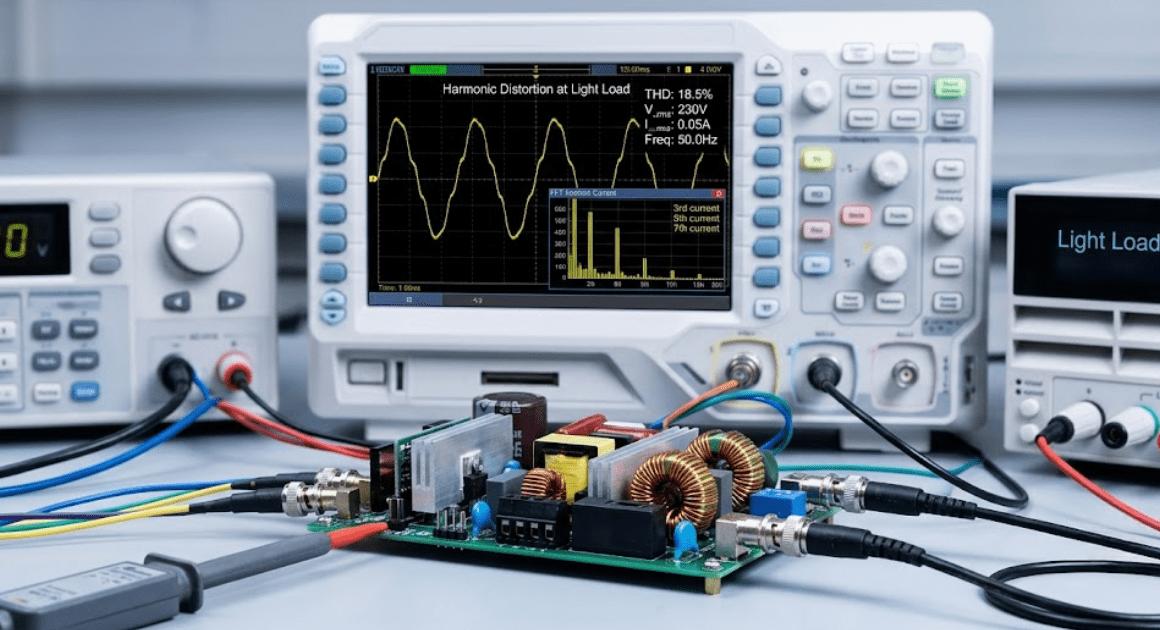
本指南概述了六项仿真验证,可帮助工程师在进行硬件测试之前,对功率因数校正级进行控制稳定性、启动响应和谐波失真的测试。


本指南概述了六项仿真验证,可帮助工程师在进行硬件测试之前,对功率因数校正级进行控制稳定性、启动响应和谐波失真的测试。
一份关于如何根据求解器可见性、模型开放性、时间步长控制、初始化、数据访问以及工作流适配性,选择EMT仿真软件和用于暂态分析的电力系统分析软件的实用指南。
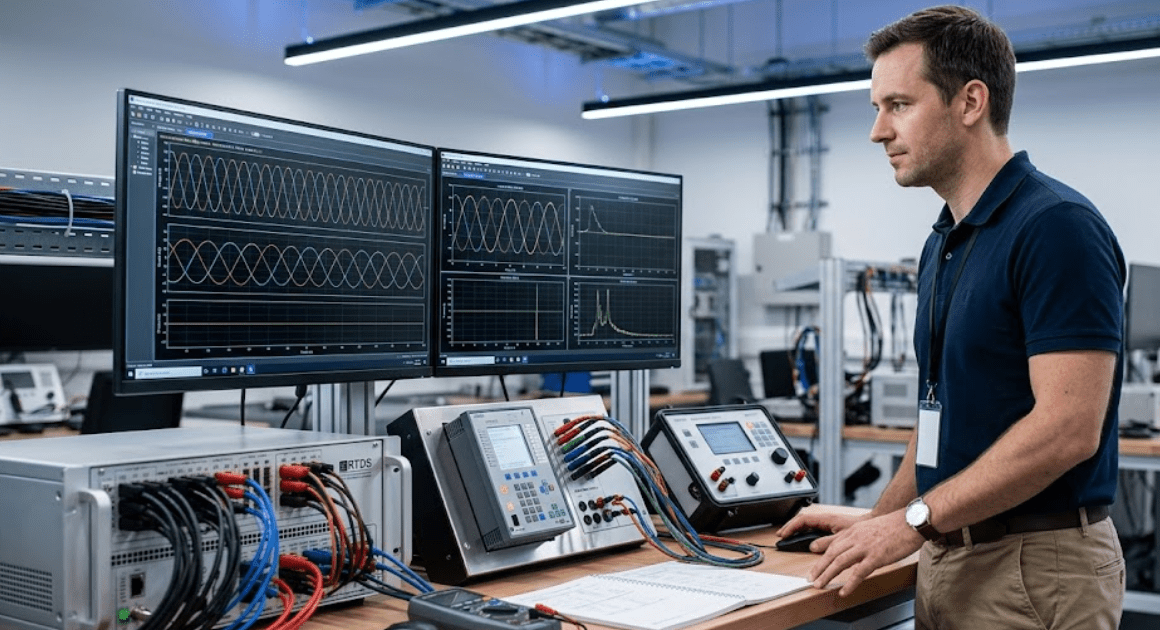
本指南阐述了实时仿真如何支持电力系统测试,其与离线研究有何区别,以及在验证过程中哪些模型和硬件选择最为关键。
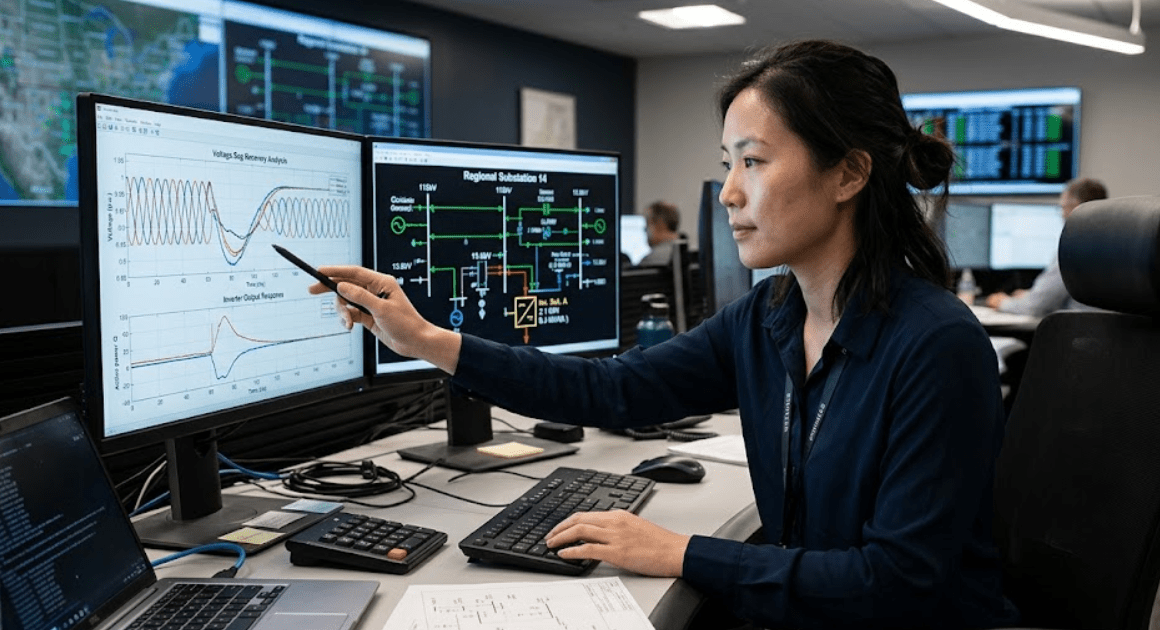
本文阐述了逆变器模型精度如何影响可再生能源并网研究、并网审查、稳定性分析以及IEEE 1547标准合规性检查。
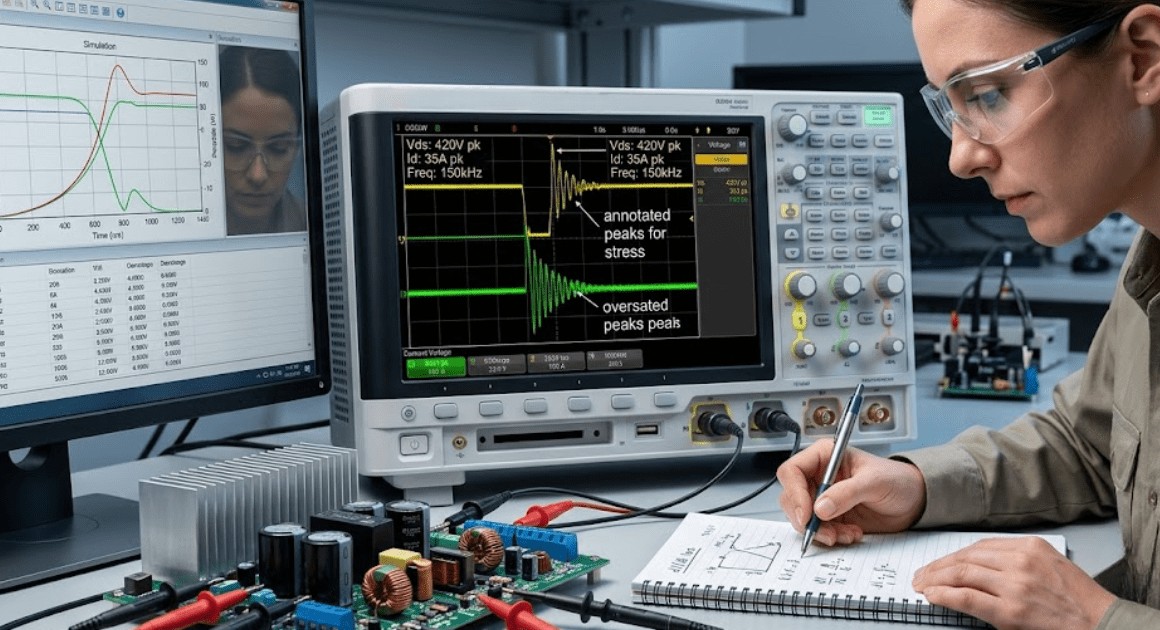
本指南将阐述电力电子仿真软件如何缩短原型开发周期,说明在哪些情况下硬件依然至关重要,以及免费工具何时适用于早期设计工作。
一份关于电力系统硬件在环测试的完整指南,涵盖时序、接口设计、电力电子控制、继电保护验证、软件选型以及常见的设置错误。
本指南将说明功率硬件在环(PHIL)测试的作用,它与控制器在环(HIL)测试有何不同,以及电网设备项目在何种情况下需要采用PHIL。
针对6个关键因素的清晰对比,旨在帮助工程师、教育工作者和研究人员根据研究精度、工作流程适配性以及长期使用需求,选择合适的电力系统仿真软件。

