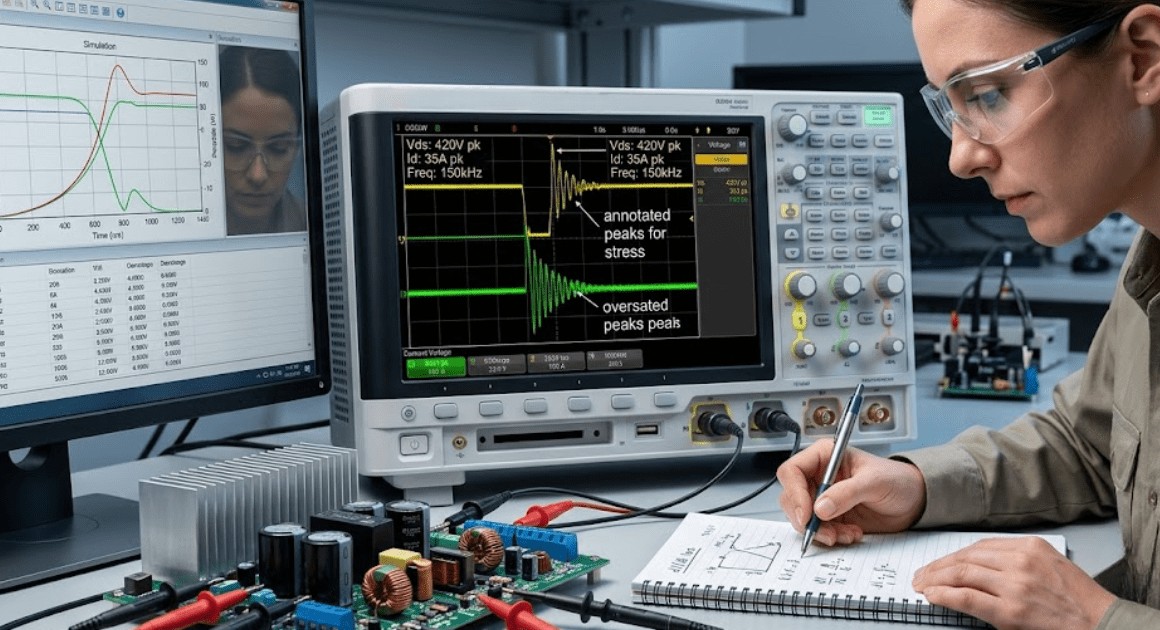
Leitfaden dazu, was ein Doppelimpulstest misst, wie man eine Simulation einrichtet und wie man die Schaltleistung vor dem Test auf der Hardware-Prüfbank abschätzen kann.



Leitfaden dazu, was ein Doppelimpulstest misst, wie man eine Simulation einrichtet und wie man die Schaltleistung vor dem Test auf der Hardware-Prüfbank abschätzen kann.
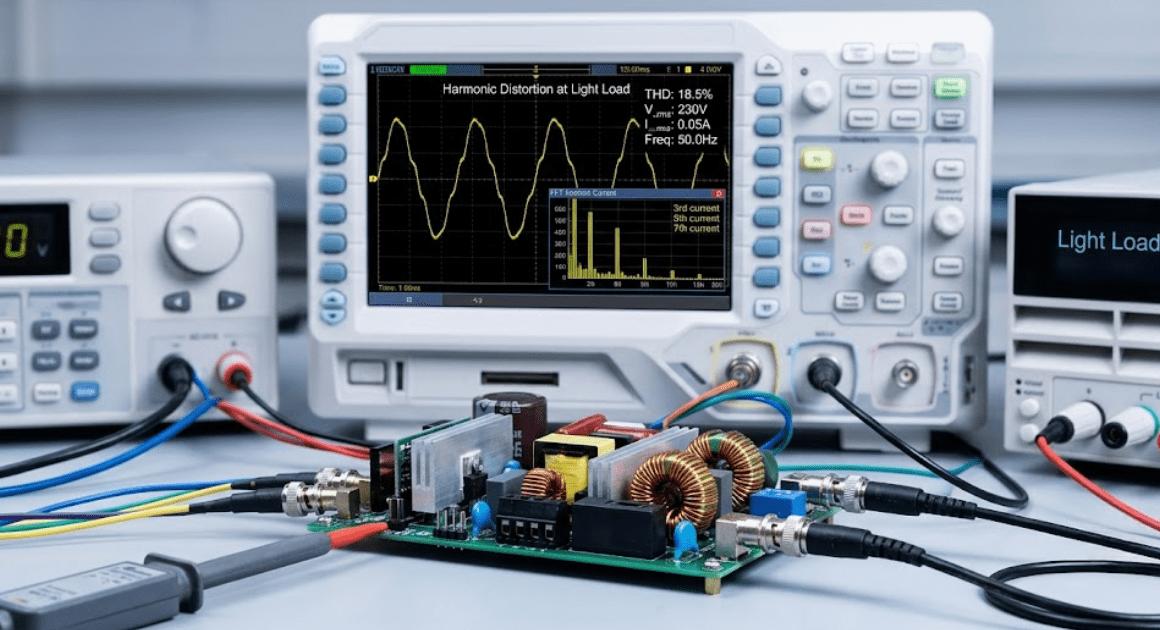
In diesem Leitfaden wird erläutert, wie Sie in der Zeitbereichssimulation eine Oberschwingungsanalyse und eine Netzqualitätsanalyse durchführen, nichtlineare Lasten modellieren, die Gesamtverzerrung berechnen und die Grenzwerte an den entsprechenden Sammelschienen überprüfen können.
Dieser Leitfaden beschreibt sechs Simulationsprüfungen, mit denen Ingenieure vor Tests die Regelstabilität, das Anlaufverhalten und die Oberschwingungsverzerrung von Blindleistungskompensationsstufen überprüfen können.
Die Analyse der Ferroresonanz in Transformatoren und Verteilungsnetzen erläutert die Auslöser von Schaltvorgängen, Überspannungsmechanismen, den Simulationsaufbau, Erdungseffekte sowie Präventionsmaßnahmen.

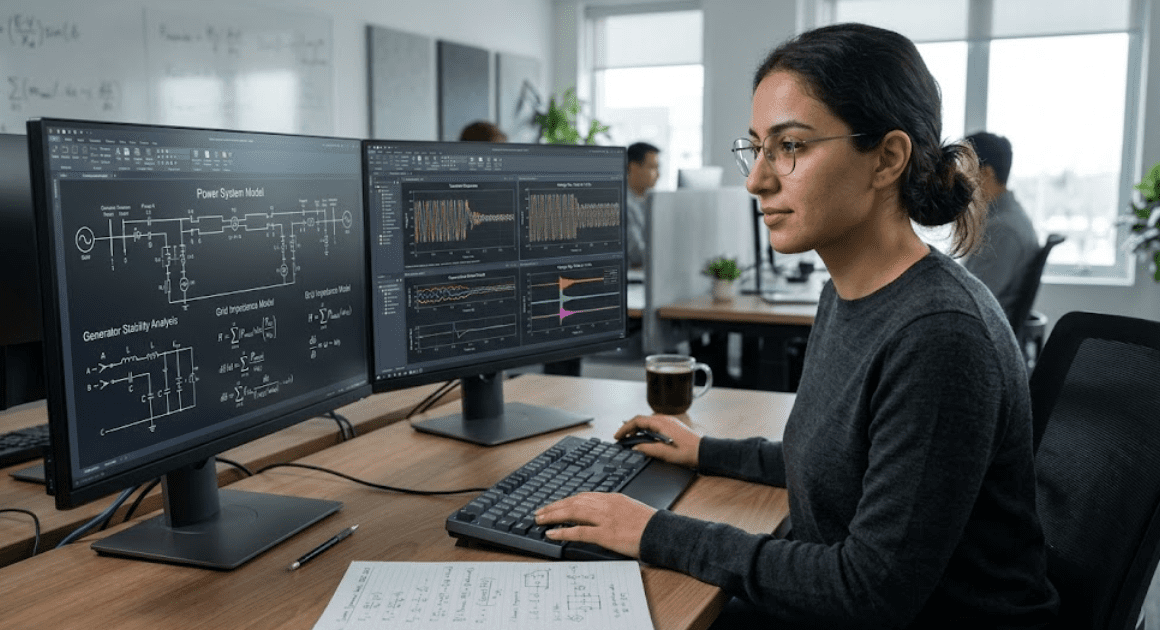
In diesem Beitrag wird erläutert, wie ein Batterie-Energiespeichersystem für Netzunterstützungsstudien modelliert wird, wobei der Schwerpunkt auf Ladezustandsgrenzen, Wechselrichtersteuerungen, Anlagensteuerung und Fehlerverhalten liegt.
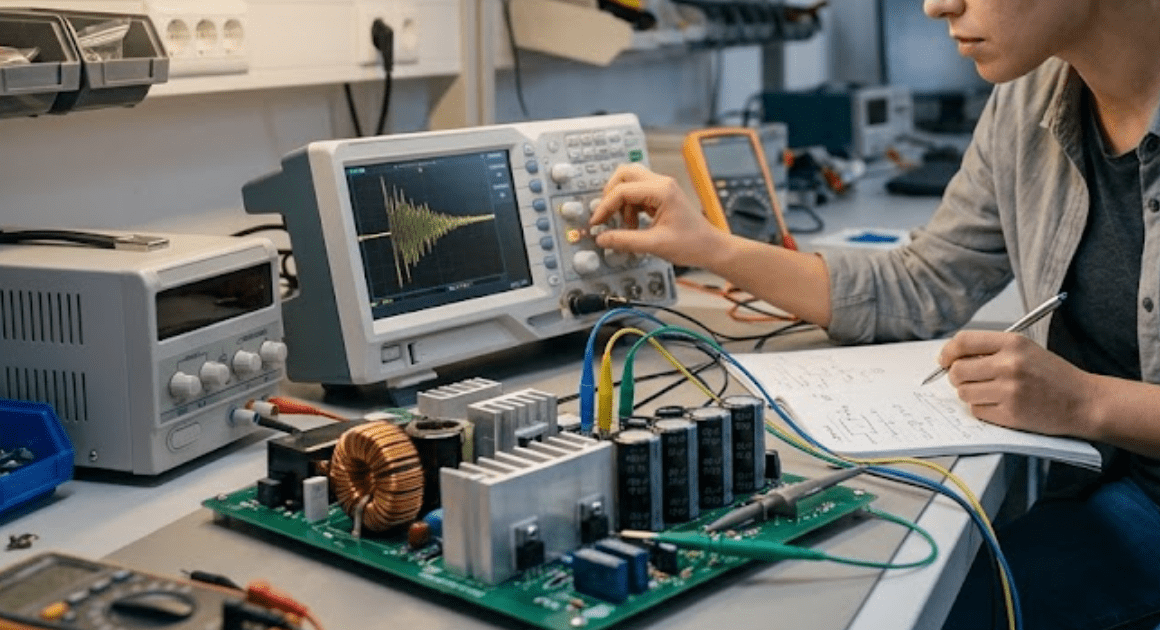
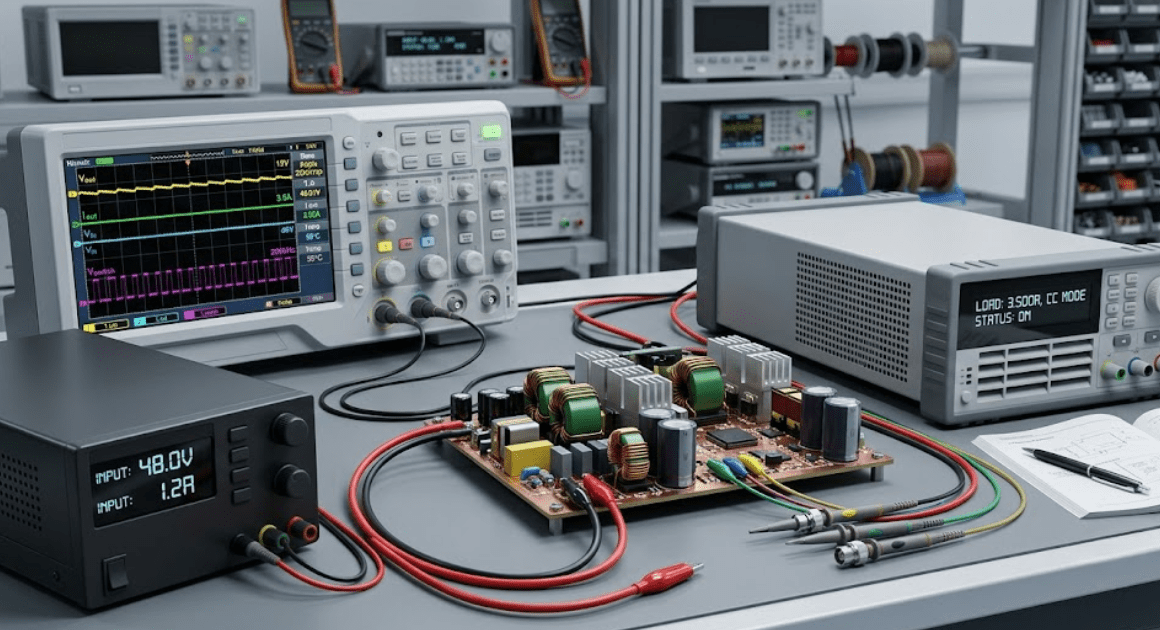
In diesem Leitfaden wird erläutert, wie ein Prototyp eines Stromwandlers mithilfe von Simulationen, Betriebsgrenzen, Steuerungsprüfungen, thermischen Analysen, Fehleranalysen und einer Checkliste vor der Hardware-Erstellung vor Tests validiert wird.
Ein praktischer Leitfaden zur Auswahl von EMT-Simulationssoftware und Software zur Analyse von Stromversorgungssystemen im Hinblick auf Transienten, basierend auf den Kriterien Solver-Transparenz, Modelloffenheit, Zeitschrittkontrolle, Initialisierung, Datenzugriff und Anpassung an den Arbeitsablauf.
In diesem Beitrag wird erläutert, wie man das Verhalten von Überspannungsableitern modelliert, Blitz- und Schalttransienten simuliert und die Schutzabdeckung sowie die Energieaufnahme in einem Umspannwerk überprüft.

