This piece explains how inverter model fidelity affects renewable grid studies, interconnection reviews, stability analysis, and IEEE 1547 compliance checks.
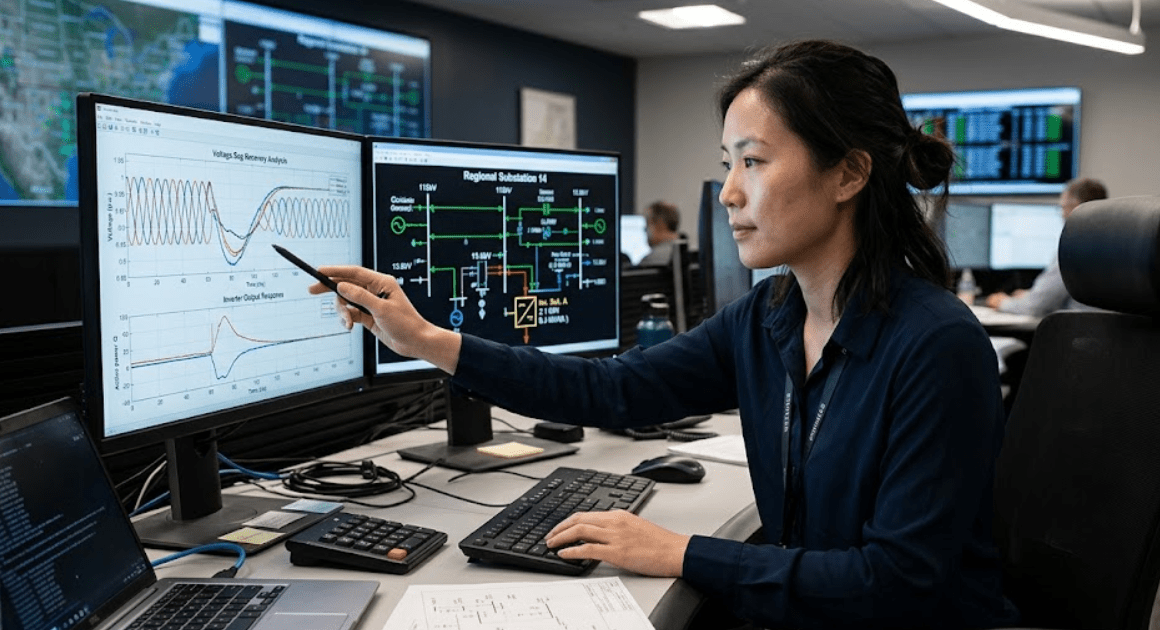


This piece explains how inverter model fidelity affects renewable grid studies, interconnection reviews, stability analysis, and IEEE 1547 compliance checks.
This guide explains how power electronics simulation software cuts prototype loops, where hardware still matters, and when free tools fit early design work.
A complete guide to hardware in the loop testing for power systems, covering timing, interface design, power electronics control, relay validation, software selection, and common setup errors.
This guide explains what power hardware in the loop testing does, how it differs from controller HIL, and when grid equipment projects need PHIL.
A clear comparison of 6 factors that help engineers, educators, and researchers choose power system simulation software for study accuracy, workflow fit, and long-term use.
Most wrong power system simulation results come from setup errors, not math errors.
Engineers trust a power system simulator when the model reflects the study question, the data, and the operating limits that shape system behaviour. Trouble starts when a convenient template replaces a verified network model or when a stable waveform hides a bad assumption. You’re usually not dealing with a software failure. You’re dealing with a model that answered a different question than the one you meant to ask.
A power system model loses accuracy when its structure, data, or numerical settings do not match the study objective. Each mistake below creates a specific kind of error, and each one can be checked early before you spend hours trusting results that won’t hold up.
“Engineers trust a power system simulator when the model reflects the study question, the data, and the operating limits that shape system behaviour.”
A model must match the time scale and physics of the question you’re asking. A steady-state load flow will show bus voltages and line loading, but it won’t tell you how a relay timer responds or how converter current peaks in the first milliseconds of a fault. A common miss appears when an averaged inverter model is used to judge sub-cycle current stress during a breaker operation. That result will look clean, yet it hides the switching and control detail that actually matters. If the study scope is vague, the model becomes a compromise and your answers lose value.
Per unit errors quietly distort almost every calculated quantity in a network study. Trouble often starts around transformers, where engineers carry a 100 MVA base through one section and a different base through another without converting impedances. A 13.8 kV to 69 kV transformer is a common place for this slip, because the voltage base shifts and the impedance looks reasonable even when it is not. The model still runs, which makes the mistake easy to miss. Short-circuit levels, voltage drops, and machine currents then look believable while every downstream result is biased.
Default load blocks are useful for setup speed, but they often hide the wrong electrical behaviour. A constant power load can be acceptable for a planning snapshot, yet it will misrepresent voltage recovery if the actual site has induction motors, heating loads, or mixed feeder demand. A motor-heavy industrial bus will pull current very differently after a sag than a static constant power block suggests. That difference affects fault recovery, motor stalling, and protection pickup. If you don’t check how the load model reacts to voltage and frequency changes, the study will tell a neat story about a system that doesn’t exist.
Source strength shapes fault current, voltage stiffness, and control interaction, so guessed values will corrupt the whole model. Engineers often plug in a short-circuit level from memory or reuse data from a nearby substation and assume the upstream grid is close enough. A weak connection point for a wind plant, for instance, will behave very differently from a strong urban feeder with the same nominal voltage. Converter stability, flicker response, and fault current all shift when the Thevenin equivalent is wrong. If you haven’t verified source impedance and X/R ratio, you haven’t verified the study.
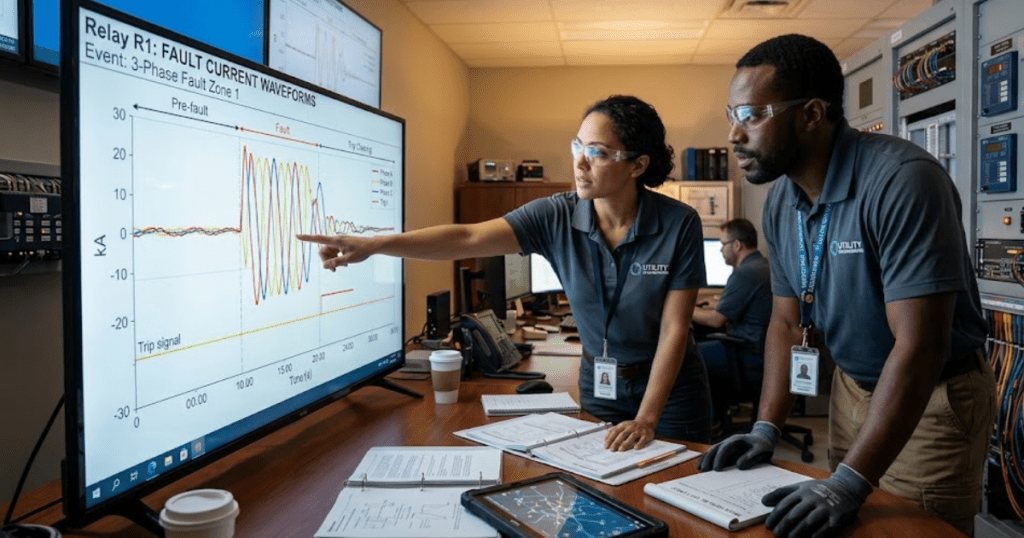
Numerical settings matter as much as network data when the study includes fast transients. A solver step that works for a slow voltage profile won’t capture capacitor energization, converter commutation, or a breaker restrike. You’re likely to miss the very spike or oscillation you set out to inspect if the time step smooths it away. That problem shows up when current peaks look modest and switching waveforms appear unusually clean. The model is not calm in that case. The solver is simply averaging out behaviour that occurs between samples, and your protection or insulation assessment will be wrong.
Dynamic results are only credible when the starting point is physically consistent. A common error appears when generator dispatch, tap positions, or control references are entered manually and the model begins from a state that could never exist in normal operation. A synchronous machine might start with an exciter output beyond its limit or with terminal voltage that doesn’t match the solved network condition. Once the disturbance is applied, you can’t tell which oscillation came from the event and which came from the bad initialization. The waveform looks busy, but it reflects startup correction rather than system response.
Control systems need their limits inside the model or the results will overstate stability and recovery. Engineers sometimes model the main controller and skip current clamps, saturation, deadbands, rate limits, or protection interlocks because the core loop seems more important. A grid-forming inverter, for example, will appear heroic during a voltage dip if its current ceiling is missing. The same happens with exciters and governors when minimum and maximum outputs are left out. The controller then produces elegant responses that no physical device can sustain. If a control action looks perfect, check the limits first because something important often isn’t there.
A model should earn trust through simple checks before it is used for deeper studies. Engineers skip this step when the one-line diagram is complete and the waveforms look tidy, but appearance is a poor test. A feeder model should reproduce known voltages, losses, and fault levels before you use it for contingency work. A transparent workflow matters here, and SPS SOFTWARE is useful in that context because you can inspect assumptions, parameters, and equations instead of treating the power system simulator as a sealed box. If the base case fails a basic check, every later scenario will carry the same error.
“If the base case fails a basic check, every later scenario will carry the same error.”
| Model issue | What the result is really telling you |
|---|---|
| 1. Using a study model that does not match the question | The output reflects the wrong time scale or device detail, so the answer does not fit the study goal. |
| 2. Mixing per unit bases across the network model | Reasonable-looking values can still be wrong when base conversions are inconsistent across voltage levels. |
| 3. Reusing default load models without checking behaviour | Static defaults can hide how actual site loads react during sags, recovery, and frequency shifts. |
| 4. Estimating source strength without verified grid data | Guessed grid impedance shifts fault current and voltage stiffness enough to distort the whole study. |
| 5. Picking a solver step that misses fast events | Clean plots can come from numerical smoothing rather than from a physically quiet system response. |
| 6. Starting dynamic studies from an invalid operating point | Early oscillations often come from bad initialization rather than from the event you intended to test. |
| 7. Leaving control limits outside the simulation model | Controllers look stronger than they are when current, voltage, and rate limits are missing. |
| 8. Trusting results before any independent model check | Base-case checks catch bad assumptions long before scenario studies make them harder to spot. |

A credible model reproduces known operating conditions, respects device limits, and gives stable answers under simple cross-checks. You should be able to explain every major assumption in plain language. If you can’t trace a result back to verified data and model structure, more detail won’t rescue it.
That review habit is what separates a useful engineering model from a polished diagram. Teams that keep assumptions visible, test simple cases first, and question clean-looking waveforms will catch more errors before they become report material. SPS SOFTWARE fits that practice when you need open, physics-based models that you can inspect and revise with care. Good modelling isn’t about making the power system simulator look busy. It’s about making every result stand up to scrutiny.

Choose EMT when the study depends on waveform detail, and choose RMS when the study depends on slower electromechanical behaviour.
That split matters more now because converter-based generation keeps adding fast controls to systems that were once dominated by synchronous machines. Wind and solar supplied 13.9% of global electricity in 2023, which means more studies now sit closer to inverter controls, fault response, and switching effects. You will get better answers when your model matches the physics that decides the result. You will get misleading confidence when it does not.
“An electromagnetic transient simulation is built for events where the waveform shape changes the outcome.”
EMT and RMS differ mainly in what they solve and what they ignore. EMT follows instantaneous voltages and currents at very small time steps. RMS replaces fast waveforms with phasors and averaged quantities. You get waveform fidelity from EMT and study speed from RMS.
A feeder fault illustrates the split clearly. EMT will show the exact fault inception angle, the dc offset in current, and the way a breaker or converter responds over microseconds and milliseconds. RMS will show the same event as a balanced or unbalanced phasor disturbance with a much smoother response. That is often enough when you care about voltage recovery, power flow redistribution, or rotor angle movement.
The important point is not model sophistication. It is model relevance. Electromagnetic transient simulation is built for events where the waveform shape changes the outcome. RMS modelling is built for cases where the averaged sinusoidal state carries the answer. If your result depends on what happens within a cycle, the phasor abstraction will hide too much.
RMS models are the right fit when the study question sits on a slower time scale than the power frequency waveform. They capture electromechanical swings, voltage regulation, and frequency response efficiently. They also support large networks and many contingencies without excessive run time. That makes them a practical choice for stability work.
A generator trip study shows why. You usually want to know how frequency dips, how governors respond, how automatic voltage regulators support voltage, and whether rotor angles remain bounded. None of those answers depends on individual switching pulses or travelling wave effects. An RMS model lets you screen many disturbances across a transmission network and compare credible operating cases quickly.
You should still be disciplined about model scope. RMS will not rescue a poor representation of controls, load recovery, or protection logic. It simply gives you a strong fit for slower behaviour. When the pass or fail measure is damping, settling, frequency nadir, or post-fault voltage recovery, RMS will usually give the answer you need with less modelling burden.
EMT models fit studies where subcycle detail decides the result. They resolve switching events, fast control loops, saturation effects, and non-sinusoidal waveforms directly. That makes them the correct tool for converter commutation, transformer inrush, and many detailed fault studies. RMS models smooth away those mechanisms.
A transformer energization case is a simple illustration. The inrush current peak depends on residual flux, point-on-wave closing, and core saturation, all of which unfold within fractions of a cycle. An RMS model can approximate the event, but it will not reproduce the actual waveform that a relay, filter, or converter controller sees. The same limit appears with pulse-width-modulated converters and dc-link control interactions.
EMT is not just about getting a prettier waveform. It is about representing the mechanism that causes a trip, an overvoltage, or a control instability. If that mechanism lives inside the cycle, your model needs to live there too. That is why electromagnetic transients matter most when switching detail and non-linear effects are part of the study question.
Time scale is the quickest and most reliable screen for model choice. A study dominated by seconds and electromechanical motion belongs in RMS. A study dominated by microseconds, milliseconds, or point-on-wave effects belongs in EMT. Mixed cases need you to decide which time band actually determines the pass or fail outcome.
Protection and control sequences often look mixed at first glance. A fault may start in microseconds, provoke relay logic over milliseconds, and reshape system frequency over several seconds. Your model choice should follow the decision point, not the event duration. If you only need to know system recovery after a cleared fault, RMS is enough. If you need to know why the relay operated late or why the converter blocked, EMT is the safer choice.
That is also where transparent workflows matter. SPS SOFTWARE gives you a way to keep models inspectable and editable, so you can choose detail level with intent instead of treating the simulator as a black box. Teams work faster when they can see which equations and assumptions are carrying the answer.
| Study focus | What the model choice usually means |
| A frequency dip after a generator trip is mainly a slower system response. | RMS usually fits because waveform shape does not decide the result. |
| A converter control issue appears within a few milliseconds after a fault. | EMT usually fits because fast control interaction is hidden in phasor form. |
| A relay operation depends on fault inception angle or transient distortion. | EMT gives the quantities the relay will actually see during the event. |
| A planning team must screen many contingencies across a large network. | RMS gives broader coverage because the models run faster and scale better. |
| A weak grid study depends on inverter current limits and controller timing. | EMT is usually the safer choice because the deciding physics is too fast for RMS averaging. |
Protection studies often need more detail than RMS can provide because relays respond to quantities that change within a cycle. Fault inception angle, current dc offset, current transformer saturation, and voltage transformer transients can alter what the relay measures. EMT will represent those effects directly. RMS will often smooth them into a cleaner event than the relay actually sees.
A distance relay on a long line is a good case. The apparent impedance during the first cycles after a fault can shift because of cvt transients, fault resistance, and waveform distortion. A differential relay can also react badly when current transformer saturation distorts one side more than the other. Those are not minor details when your study asks why a trip happened or why it failed to happen.
RMS still has a place in protection work. It is useful for broad coordination checks, grading margins, and large fault sweeps where the relay measurement process itself is not under test. Once the study moves from settings review to relay behaviour under stress, EMT becomes much more than a refinement. It becomes the model class that matches the protection physics.
Systems with many converters push modelling toward EMT because converter controls react on time scales that phasor models often compress too aggressively. Grid-following controls, current limits, phase-locked loops, and dc-link dynamics can interact within milliseconds. Those interactions can decide stability, protection response, or equipment stress. RMS can miss them even when the wider network looks slow.
A weak-grid solar plant is a familiar example. Voltage dips, current limiting, and phase tracking can create behaviour that looks stable in an averaged RMS representation but becomes oscillatory or blocked in EMT. That matters more as converter penetration rises. Solar photovoltaic generation rose by 25% in 2023, so you will face more studies where inverter detail is part of the main question.
You do not need EMT for every converter case. A well-validated average-value representation can still support many planning studies. The warning sign appears when control limits, harmonics, dc coupling, or weak-grid interaction sit near the event you care about. Once those features are close to the boundary of acceptable performance, waveform-level modelling stops being optional.
EMT gives more physical detail, but it also asks for more data, more computation, and more care in model building. RMS asks less from you and often returns answers faster. The better choice is the one that captures the deciding mechanism with the least unnecessary burden. More detail will not help if the extra detail is poorly known.
A plant-level study can illustrate the tradeoff. An RMS network with validated machine and controller models might let you test dozens of contingencies in the time one EMT case takes to set up and run. That speed matters when you are screening operating points, seasonal conditions, or protection settings. EMT becomes costly when switching devices, control blocks, and non-linear elements all require careful parameterization.
False precision is the main risk. An EMT model with guessed controller gains or missing transformer saturation data can look authoritative while answering the wrong question. RMS has its own limits, but it often forces clearer simplification. You will make better choices when you treat model fidelity as a targeted tool rather than a badge of seriousness.
“False precision is the main risk.”

You should choose the simplest model that still captures the physics that decides the result. RMS is the right mode when averaged quantities answer the study question. EMT is the right mode when switching, control interaction, fault inception, or relay measurement set the outcome. Clear model purpose will save time and avoid false confidence.
Use this screen before you build or refine a model:
That judgment gets better with practice, and it improves further when the models stay open enough for you to inspect the assumptions. SPS SOFTWARE fits that kind of work because clear, physics-based modelling helps teams explain results instead of just presenting them. Good studies come from disciplined scope, validated parameters, and the willingness to use less detail when less detail gives the right answer.
Engineers get dependable results when the model is built to answer a specific technical question, with a clear time scale, clear outputs, and data that matches the needed accuracy. That approach keeps you from chasing noise in the results or trusting plots that look right but are based on the wrong assumptions. Poorly specified studies often turn into rework, and power interruptions in the United States have been estimated to cost $28 billion to $169 billion per year, which puts a price tag on bad engineering information. Good modelling reduces that risk because it makes uncertainty visible early.
Power system simulation is not a single technique. You’ll choose between steady and transient studies, between RMS simulation and EMT simulation, and between simple and detailed component representations. Each choice trades speed, fidelity, and data burden in a way that directly affects the trust you can place in results. When you treat those choices as an engineering design task, the model becomes a reliable test bench for behaviour, limits, and protection response.
“Accurate electrical power system modelling comes from disciplined choices, not bigger models.”
Start with the question the study must answer and the outputs you will accept as proof. Define the disturbance types, the time window, and the signals you’ll read, such as voltages, currents, torque, frequency, or protection pickups. Lock down pass fail criteria early, not after plots look appealing. That discipline keeps the model aligned to engineering intent.
Goals that sound similar often require different modelling. A voltage ride-through check needs event timing, control limits, and sometimes switching behaviour, while a planning study often needs voltage profile, losses, and thermal loading under many operating points. Stability work needs angles, frequency, and damping, with careful disturbance size selection. Fault studies need correct source impedance and protection logic assumptions, plus a clear definition of the fault location and impedance.
Write down what “accurate enough” means in numbers, not adjectives. A 1% voltage magnitude target and a 10 ms timing tolerance lead to different choices than a 5% target and a 200 ms tolerance. Treat model scope like a boundary condition, then stick to it when stakeholders request extra detail. The model will stay useful when its purpose stays narrow and testable.
Network fidelity should match the physics that shapes your outputs. Use three phase representations when unbalance, grounding, harmonics, or protection depends on phase detail, and use positive sequence when the study is balanced and focused on bulk behaviour. Parameter quality matters as much as topology, because small impedance errors can flip fault current, voltage drop, and control gains. A simpler model with verified data will beat a detailed model with guessed values.
Data work should be planned like engineering work, with ownership and checks. Nameplate values, test reports, and commissioning records will disagree, so choose a priority order and document it. Pay attention to base values, unit consistency, and how the utility defines short circuit strength at the point of interconnection. Keep the “source of truth” in a single place so updates do not drift across files.
The fastest way to avoid model drift is to validate inputs before tuning anything else.
The main difference between RMS simulation and EMT simulation is what gets averaged out. RMS simulation tracks slower electromechanical and control behaviour using phasors, so it runs quickly for minutes of system time. EMT simulation resolves instantaneous waveforms, so it captures switching, harmonics, and fast control interactions. Choose the method that keeps the physics you need and drops the rest.
A concrete case makes the choice clear. A 25 kV feeder with a large inverter-based plant can show clean steady voltage in an RMS run, yet still trip on a fast undervoltage ride-through timer triggered by a capacitor bank energization transient. EMT simulation will show the peak voltage dip timing and the control saturation that drives the trip, while RMS simulation will often smooth those details away. That distinction decides protection settings, not just plot shape.
“Confidence comes from execution habits that stay consistent across projects: clear study goals, fit-for-purpose fidelity, careful numerics, and validation that can stand up to questions.”
| Selection check | RMS simulation fits when | EMT simulation fits when |
| Time scale you must trust | Seconds to minutes drive the outcome, not sub-cycle waveforms. | Microseconds to milliseconds shape protection, controls, or insulation stress. |
| Phenomena you must capture | Angle and voltage stability, frequency response, and slower control loops dominate. | Switching, harmonics, unbalance, and fast converter controls dominate. |
| Data you need to gather | Positive-sequence parameters and aggregated controls are acceptable. | Detailed converter, filter, saturation, and grounding parameters are required. |
| Outputs you will compare | RMS voltages, power flows, angles, and relay timing at a coarse level. | Instantaneous waveforms, peak currents, and fast threshold crossings. |
| Run-time expectations | Many scenarios can be swept for planning and sensitivity studies. | Fewer scenarios are practical, so scope must be tighter. |
Component fidelity should be chosen to match the study outputs, not to match the drawing library. Generators need the right level of machine model, excitation, and governor detail for stability, plus correct limiters when protection margins matter. Loads should reflect behaviour, not just power, since voltage and frequency sensitivity can drive results. Converters need control dynamics, current limits, and filtering detail aligned with the simulation method.
Control models will decide stability and protection outcomes, so treat them as first-class parts of the model. Use the same sampling, delays, and saturation logic that exist in the control implementation when timing matters. Verify that limiter interactions are represented, since current limiting can flip a voltage controller into a different mode during faults. Keep control tuning linked to the operating point, since gains that look stable at rated conditions can misbehave at light load.
Model transparency matters when you need to trust limits and corner cases. SPS SOFTWARE is often used in teaching and engineering teams that want open, editable component models so students and engineers can inspect equations, not just parameters. That approach supports better reviews because assumptions are visible, and it reduces the chance that a hidden default setting becomes the reason a study result cannot be reproduced. Usable fidelity is the level you can explain and defend in a design review.
Numerical settings are part of the model, because they shape what the simulation can faithfully resolve. Time step choice sets the fastest behaviour you can trust, and solver choice sets how well the model handles stiffness from switching, saturation, and tight control loops. Initial conditions must represent an operating point that is physically consistent, or the first seconds of data will be dominated by artificial settling. Stable numerics create stable engineering interpretation.
Time steps should be justified using the fastest dynamics you care about and the switching or sampling rates present. EMT studies often need small fixed steps to resolve switching and protection timing, while RMS studies can use larger variable steps that still preserve control dynamics and event timing. Pay attention to event handling, since breaker operations and faults create discontinuities that challenge integrators. Use tolerances that are strict enough to preserve thresholds, but not so strict that the solver churns without improving engineering value.
Initialization should be treated as a validation step, not a formality. Confirm that power flow targets match the intended dispatch and loading, and confirm that control states start within limits. Watch for hidden states like integrator windup or filter initial conditions that create nonphysical transients. A clean start makes later transients easier to interpret because the model is not fighting its own setup.
Validation turns simulation output into engineering evidence. Check that the model reproduces known steady-state values, then test simple disturbances where you can predict the direction and scale of the response. Compare timing against measured events when you have records, and keep a clear separation between model verification and model tuning. A validated model supports confident settings and protection coordination.
Sanity checks should be structured and repeatable. Confirm that power balance makes sense, that voltage drops match impedance and loading, and that fault levels match known short circuit strength. Run sensitivity checks on uncertain inputs, because a result that flips with a 5% impedance change is not ready for a setting change. Keep a clear log of what changed and why, since model drift is a common failure mode in multi-person teams.
Validation effort is justified because simulation is software, and software mistakes have measurable cost. Software defects were estimated to cost the U.S. economy $59.5 billion each year, and modelling workflows are not immune to that pattern. Treat model checks like tests, keep results reproducible, and insist on traceability from requirement to output. Sharing results becomes safer when you can show how the model earned trust.
Tool selection should follow the modelling method, data needs, and review requirements you already defined. Look for transparent component representations, good handling of events, and workflows that support version control and repeatable runs. Integration with MATLAB/Simulink matters when your controls, scripts, or parameter sweeps live there. The best tool will be the one that lets you justify assumptions and reproduce results without heroics.
Practical criteria help keep tool choice grounded. Import and export options matter for network data, protection settings, and time-series inputs. Model inspection matters for education and technical reviews, because you will need to explain why a limiter engaged or why a relay picked up. Automation matters for sensitivity studies, since manual clicking often introduces silent differences between runs.
Good modelling work feels calm because each choice has a reason. SPS SOFTWARE fits teams that value physics-based, editable models and smooth MATLAB/Simulink workflows, especially when the goal is understanding behaviour rather than producing a single plot. Confidence comes from execution habits that stay consistent across projects: clear study goals, fit-for-purpose fidelity, careful numerics, and validation that can stand up to questions. That discipline will beat any shortcut, even when schedules are tight.