Principaux enseignements
- Le timing, les limites et les définitions des signaux détermineront si les résultats du réglage seront transférés au matériel.
- La profondeur de modélisation PWM doit correspondre à la bande passante de la boucle, les retards étant traités comme des dynamiques de premier ordre.
- La séparation des boucles interne et externe ainsi que les contrôles de stabilité dans les pires conditions éviteront les surprises de dernière minute.
Un bon modèle de contrôle d'onduleur permettra de prédire la stabilité avant le fonctionnement du matériel. Vous pourrez effectuer des réglages plus rapidement, car les marges de stabilité du contrôle resteront visibles. Vous détecterez rapidement les pertes de phase et les effets de windup. Cela est plus important que l'adaptation de l'ondulation de commutation.
La plupart des problèmes surviennent lorsque le modèle est trop idéal. La modélisation PWM qui ignore le délai de mise à jour surestimera la marge de phase. Le contrôle de la boucle interne qui ignore le filtrage du capteur surestimera la bande passante. Le contrôle de la boucle externe qui suppose une grille ou une charge fixe ne fonctionnera plus lorsque les conditions changeront.
Ce dont les ingénieurs ont besoin d'un modèle de commande d'onduleur avant de commencer le réglage
Définissez ce que le contrôleur voit et quand il le voit avant de toucher au gain. Intégrez le temps d'échantillonnage, la fréquence porteuse, le délai et le filtrage des mesures dans le modèle. Définissez chaque signal avec ses unités, son échelle et son signe. Ajoutez les limites et les saturations qui existeront dans le matériel.
Un onduleur triphasé commutant à 10 kHz avec un pas de 50 µs constitue un bon banc d'essai. Le cycle de service est mis à jour une fois par pas, modélisez donc un délai d'un pas entre le calcul et la sortie PWM. Ajoutez le même filtre de courant de 2 kHz et le même facteur d'échelle du capteur que ceux que vous prévoyez d'utiliser. Balayez le lien CC de 700 V à 900 V et faites varier l'inductance du réseau de 0,5 mH à 2 mH.
Le timing et les limites déterminent où le crossover peut être placé sans provoquer de sonnerie. Un retard caché vole la phase et transforme un gain sûr en oscillation. Une saturation manquante masque l'enroulement de l'intégrateur et rend les transitoires plus douces. Un modèle simple avec des hypothèses visibles sera plus performant qu'un modèle détaillé avec des hypothèses cachées.
« Un retard caché vole la phase et transforme un gain sûr en oscillation. »
5 étapes pour créer des modèles de contrôle d'onduleur
Suivez l'ordre de construction que vous allez mettre en œuvre. Verrouillez d'abord les cibles et les limites, puis choisissez une abstraction PWM, puis fermez les boucles internes et externes. Vérifiez la stabilité à tous les points de fonctionnement à la fin. Cet ordre nous empêche de régler les erreurs de modélisation.
| Définir dès le début les objectifs de contrôle et les limites opérationnelles | Des objectifs numériques clairs et des limites strictes empêchent les gains de réglage qui semblent stables dans la simulation, mais qui échouent dès que la saturation, des défauts ou des changements de plage apparaissent. |
| Sélectionnez une représentation PWM qui correspond à la bande passante de contrôle. | Le modèle PWM doit préserver les effets de synchronisation et de gain qui déterminent la marge de phase, sinon les résultats de stabilité de contrôle seront trompeurs, même si les formes d'onde semblent correctes. |
| Construisez la boucle de courant interne avec des hypothèses claires sur l'usine. | Une boucle de courant reste prévisible uniquement lorsque l'installation électrique, le délai de détection et le filtrage sont explicites et cohérents dans l'ensemble du modèle. |
| Ajoutez la boucle de tension ou d'alimentation externe avec une séparation adéquate. | Les boucles externes restent stables lorsque leur bande passante est intentionnellement plus lente que la boucle actuelle, ce qui réduit les interactions et l'instabilité cachée. |
| Vérifier la stabilité du contrôle à tous les points de fonctionnement et retards | La stabilité doit être vérifiée dans les conditions les plus défavorables en termes de tension, d'impédance et de retard, et pas seulement aux points de fonctionnement nominaux. |
1. Définir dès le début les objectifs de contrôle et les limites opérationnelles
Écrivez les objectifs sous forme de chiffres que vous pouvez tester, et non sous forme d'intentions. Choisissez la variable régulée, le temps de stabilisation, la limite d'écart maximal et l'erreur en régime permanent. Définissez la plage de fonctionnement pour la tension continue, l'impédance du réseau ou de la charge, ainsi que les règles de déclassement. Intégrez les limites de courant, de tension et de service dans le modèle sous forme de saturations et de bornes. Un onduleur de 5 kW peut viser un temps de stabilisation du courant de 2 ms tout en plafonnant le courant de phase à 12 A de crête et en limitant le service si le courant continu chute en dessous de 720 V. Ajoutez ce que fait le contrôleur à la limite, comme le gel de l'intégrateur, le calcul rétroactif ou la limitation du débit de référence. Rédigez un contrôle de réussite/échec par objectif afin que les tests restent cohérents. Des cibles claires vous empêchent de régler une forme d'onde qui semble propre mais qui enfreint les limites du matériel.
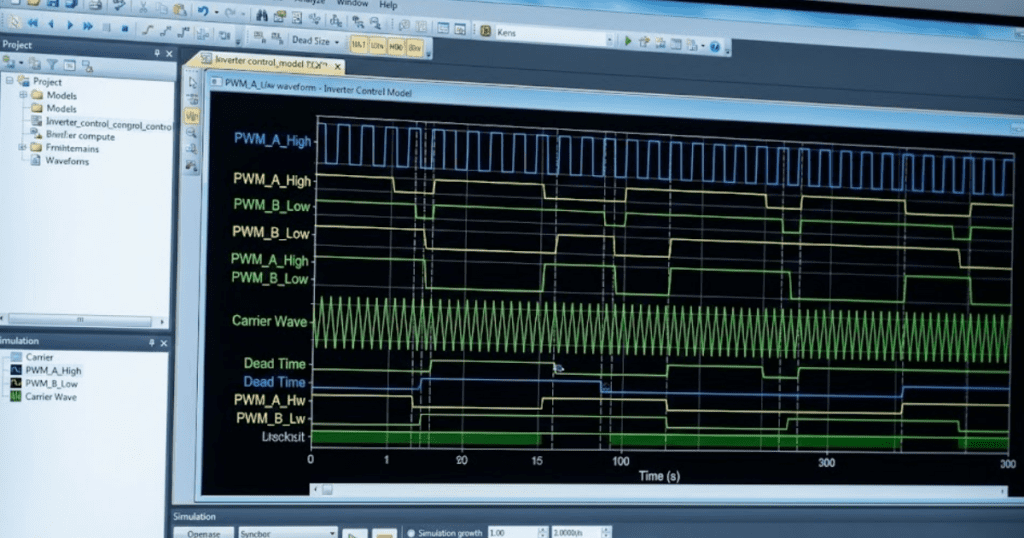
2. Sélectionnez une représentation PWM qui correspond à la bande passante de contrôle.
Choisissez une représentation PWM qui préserve le retard et le gain que votre contrôleur verra. Un modulateur moyen convient à la conception de boucle lorsque le croisement reste bien en dessous de la porteuse, mais il nécessite tout de même un retard de mise à jour du rapport cyclique. Un modulateur à données échantillonnées est important lorsque la bande passante approche un dixième de la commutation, car le retard d'échantillonnage et de maintien vole la phase. Un modèle de commutation sert à vérifier les ondulations, les harmoniques, les effets de temps mort et la résonance du filtre. Une boucle de courant de 1 kHz avec une porteuse de 10 kHz se réglera de manière fiable sur un modèle moyen qui comprend un retard de pas de commande et le gain correct du modulateur. Conservez un deuxième modèle de niveau de commutation dans le LOGICIEL SPS si vous souhaitez vérifier l'ondulation sans réécrire le contrôleur. Choisissez le modèle le plus simple qui préserve les marges de stabilité, puis ajoutez des détails uniquement lorsque les résultats divergent.
3. Construire la boucle de courant interne avec des hypothèses claires sur l'usine
Le contrôle de la boucle interne commence par une installation que vous pouvez expliquer en une ligne. Modélisez le filtre dont vous disposez, puis conservez la même convention de signes et le même cadre de référence partout. Placez le délai de détection et le filtrage dans la boucle de rétroaction, et non comme un détail de tracé. Avec un filtre L de 2 mH et une résistance de 0,15 Ω, l'installation est proche de 1/(Ls + R) avant la discrétisation. Discrétisez par pas de 50 µs, puis réglez les gains PI pour un croisement proche de 1 kHz avec une marge pour le retard. Si vous utilisez un filtre LCL, maintenez le croisement bien en dessous du pic de résonance. Traitez tout pôle de filtre supplémentaire comme une phase perdue que vous devez prendre en compte. Ajoutez un anti-windup dès le début afin qu'une pince ampèremétrique ne transforme pas la récupération en une lente dérive.
4. Ajoutez la boucle de tension ou d'alimentation externe avec une séparation appropriée.
La commande de la boucle externe restera stable uniquement si elle est plus lente que la boucle de courant. Choisissez l'objectif externe dès le départ, car la commande de tension du bus CC et la commande de tension CA voient des installations différentes. Considérez l'installation externe comme incertaine, car la puissance du réseau et le type de charge varient. Maintenez la bande passante externe au moins 5 à 10 fois inférieure à celle de la boucle de courant afin que les interactions restent faibles. Une boucle de liaison CC à 20 Hz à 50 Hz alimentant une boucle de courant à 1 kHz gérera proprement les étapes de charge. Une boucle de tension formant un réseau autour de 100 Hz restera en dessous de la boucle de courant, mais elle nécessitera une détection de tension propre. Ajoutez des limites de débit et une protection contre l'enroulement afin que la boucle externe ne continue pas à pousser lorsque la boucle interne est saturée.
« Choisissez le modèle le plus simple qui préserve les marges de stabilité, puis ajoutez des détails uniquement lorsque les résultats divergent. »
5. Vérifier la stabilité du contrôle à tous les points de fonctionnement et retards
Vérifiez la stabilité de la commande avec la boucle complète, et non avec un schéma idéal. Conservez l'échantillonnage, le retard PWM, les filtres de détection et les saturations dans le modèle de boucle lorsque vous évaluez les marges. Évaluez les pires cas, y compris la tension CC minimale, la puissance maximale et un point d'impédance faible du réseau. Un test de résistance double l'inductance du réseau, de sorte qu'une résonance LCL se déplace vers le croisement. Un autre test fait passer la référence de courant dans la limite afin que vous puissiez voir l'enroulement et le cycle limite. Utilisez les graphiques de gain de boucle pour détecter la perte de phase, puis confirmez avec un pas dans le domaine temporel qui inclut des pinces. Visez des marges acceptables après discrétisation, telles qu'une marge de phase de 45° et une marge de gain de 6 dB. Conservez un ensemble de régression court afin que les petites modifications ne réduisent pas silencieusement les marges dans tous les cas.
Appliquer ces étapes pour éviter des résultats de contrôle instables ou trompeurs
Les résultats instables sont généralement dus à des délais ou des limites cachés. Un contrôleur réglé sans délai semblera stable, puis se mettra à sonner dès qu'une mise à jour en une étape apparaîtra. Un contrôleur réglé sans saturation semblera linéaire, puis se bloquera en cas de défaillance. Les modèles rigoureux permettent de détecter ces pièges.
Imaginez une boucle réglée sur une installation moyenne à une fréquence de coupure de 1 kHz. Ajoutez un filtre de capteur de 2 kHz et un délai de calcul de 50 µs, et la marge de phase diminue. Corrigez d'abord le décalage de synchronisation, puis ajustez les gains à l'aide des mêmes tests à chaque fois. Effectuez trois vérifications répétables : une étape de courant, une chute de courant continu et un balayage d'impédance.
Écrivez vos hypothèses à la vue de tous, puis conservez-les sous contrôle de version avec le modèle. Cette habitude permet de transférer les réglages entre les étudiants, les chercheurs et les équipes produit. SPS SOFTWARE vous aide lorsque vous avez besoin d'équations de composants et de synchronisation de contrôleurs afin que les révisions restent concrètes. Une exécution cohérente permettra de maintenir les boucles stables à tous les points de fonctionnement.