Coupled electrical loss and thermal path modelling will expose peak junction temperature and device stress that average efficiency numbers hide.
Switch loss modelling becomes reliable when it uses operating-condition inputs and feeds a calibrated RC thermal network with explicit cooling boundaries and derating limits.
Validation against measurable temperatures and careful handling of temperature-dependent parameters will prevent optimistic results and support defensible thermal margins.
Loss estimates that ignore temperature rise will understate device stress, hide thermal derating limits, and push designs into avoidable failure modes. A simple reliability heuristic shows why engineers can’t treat temperature as a secondary detail: a Q10 value of 2 means a process rate doubles for a 10°C rise. Switching loss and junction temperature interact in exactly that compounding way.
“Accurate power electronics models must treat heat and switching as coupled effects.”
Good modelling does not mean maximum complexity. It means choosing loss and thermal detail that matches the decisions you need to make, then keeping the model consistent from electrical waveforms through to junction temperature. When you connect those layers cleanly, you can size cooling, set safe operating limits, and justify stress margins with numbers you can defend.
Start with loss and thermal paths you must model
Start by mapping where power turns into heat and how that heat leaves the device. You need a loss model that produces watts under the same conditions your converter will see, plus a thermal path model that turns watts into junction temperature. If either side is missing, the model will look stable while the hardware runs hot. The best starting point is a power balance you can check at every operating point.
Most teams get better results faster when they define a small set of “must-model” paths before tuning any parameters.
Switch conduction loss based on current and on-state voltage behaviour
Switching loss based on switching energy and switching frequency
Diode reverse recovery loss or channel conduction during commutation
Junction to case thermal impedance and its transient shape
Case to heatsink and heatsink to ambient thermal resistance
Thermal paths are only as accurate as their boundary conditions. Ambient temperature, airflow assumptions, mounting torque, and interface material choice will move case temperatures enough to invalidate a careful switching model. Keep the first pass simple, then tighten the pieces that change a decision, such as heatsink sizing or current limit strategy.
Model conduction and switching losses across operating conditions
Conduction and switching losses should be modelled as functions of current, voltage, switching speed, and temperature, not as fixed constants. Conduction loss is usually a voltage drop or resistance curve, while switching loss is best represented through switching energy values that scale with current and bus voltage. You’ll get the most useful results when your loss model responds to the same waveforms your control produces. That alignment turns a simulation from “average watts” into stress you can manage.
Switch loss modelling usually starts with datasheet energy curves, then adds the conditions your design changes: gate resistance, deadtime, and commutation path inductance. Those details matter because switching losses often rise when you make switching edges slower for EMI reasons, while conduction losses rise when you accept higher current ripple for smaller magnetics. A good model keeps those tradeoffs visible instead of hiding them inside a single efficiency number.
Granularity is a choice. Average-loss models work well for heat sink sizing and steady operating points, while cycle-resolved loss accumulation is better for pulsed loads and short thermal time constants. Pick the simplest approach that still shows the peak junction temperature and the margin to your derating limits.
Link loss models to RC thermal networks and heatsinks
Connect electrical losses to a thermal RC network so your model produces junction temperature, not just power dissipation. A multi-pole thermal impedance captures both fast junction heating and slow case and heatsink warming, which is essential for pulsed operation. Use a structure that matches your available data, then keep node definitions consistent across the model. Once watts flow into the network, temperature behaviour becomes predictable and testable.
Foster networks are convenient when you’re fitting published transient thermal impedance curves, while Cauer networks are easier to interpret physically when you need temperatures at internal layers. Both can work if you preserve energy and you don’t mix parameter sources. Mutual heating matters for multi-switch modules, so shared baseplate and heatsink nodes should be explicit when devices are physically close.
SPS SOFTWARE users often treat the thermal network as a first-class part of the converter model, because transparent, editable RC blocks make it easier to trace which assumption set a temperature limit. That workflow also fits cleanly into MATLAB/Simulink pipelines where electrical and thermal subsystems need to stay synchronized.
Model choice
What you can trust from results
Common failure mode when simplified too far
Fixed loss constants at one operating point
Rough steady heat sink sizing near that point
Peak junction temperature is missed during transients
Lookup tables for loss versus current and voltage
Efficiency and heating across a speed torque map
Wrong values appear when temperature changes strongly
Switching energy-based loss with waveform inputs
Loss sensitivity to control timing and commutation
Gate resistance and stray inductance effects are ignored
Single Rth and Cth thermal model
Slow thermal trends over many seconds or minutes
Short overload limits look safer than they are
Multi-pole thermal impedance with heatsink node
Peak and average junction temperatures under pulsed load
Bad boundary assumptions shift every temperature result
Represent temperature-dependent parameters and thermal derating limits
Temperature behaviour becomes believable when electrical parameters change with temperature inside the same model. On-state voltage, on-resistance, diode drops, and reverse recovery behaviour all shift with junction temperature, which feeds back into losses and can create runaway if you’re not careful. Thermal derating should be represented as an explicit limit, not as a vague “safety factor.” Clear derating logic turns temperature outputs into actionable operating constraints.
Temperature dependence does not stop at semiconductors. Copper’s temperature coefficient of resistivity is about 0.0039 per °C, so busbars, windings, and shunts dissipate more as they warm, and that heat often sits close to the power module. A model that keeps copper losses fixed will understate enclosure heating and distort case temperature predictions.
Derating should reflect the device’s published limits and your packaging limits. Junction temperature caps, maximum case temperature, and maximum allowable current at a given heatsink temperature can all be represented as conditional clamps that your control or protection logic respects. That approach also makes it easier to discuss risk with non-specialists, because a limit is easier to interpret than a hidden margin inside a parameter.
Predict transient junction temperature and manage device stress margins
“Transient junction temperature is the number that ties switching loss modelling to device stress.”
Peak junction temperature, temperature swing, and the rate of temperature change all contribute to wear mechanisms in bonds, solder, and packaging interfaces. A model that only reports average temperature cannot tell you if a short overload is safe. Treat thermal time constants as part of the design, not as a detail for later validation.
A concrete way to apply this is a motor drive that sees short torque bursts: a step from moderate load to near-rated current for a few seconds, repeated many times per hour, will create temperature swings that look small at the heatsink but large at the junction. The electrical model provides current ripple and switching frequency, the loss model converts those into watts per device, and the RC thermal network shows peak junction temperature during each burst. That output lets you set an overload timer and current limit that protects the device without giving up normal performance. It also shows when a “safe” average loss still causes damaging thermal cycling.
Stress margin should be expressed in terms you can track. Keep a clear distance to maximum junction temperature, but also watch repetitive temperature swing and current overshoot during commutation. Small changes to deadtime, gate resistance, or snubbering can cut switching losses while increasing voltage stress, so the margin you manage needs to include both thermal and electrical limits.
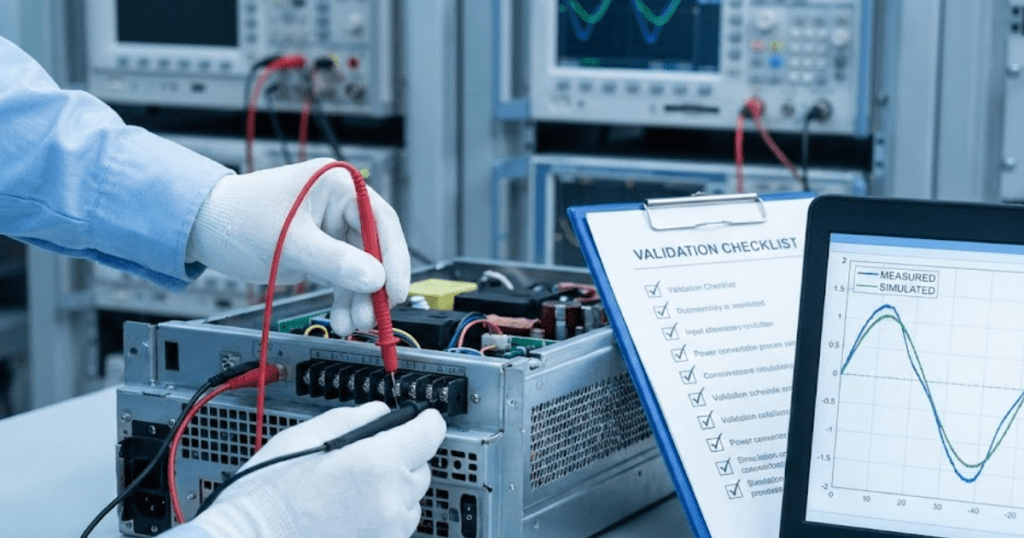
Validate models and avoid common thermal switching modelling errors
Validation should focus on removing the most common mismatches between simulated and measured temperature behaviour. Loss models must use the same reference conditions as the curves they came from, and thermal models must match how the device is mounted and cooled. Treat every parameter as “guilty until checked” when results look too optimistic. The goal is not a perfect model, but a model that fails in the same direction as the hardware.
Several errors show up again and again. Switching energy data is often applied outside its test voltage or gate drive, then scaled linearly when the physics is not linear. Thermal impedance curves are sometimes converted incorrectly between junction-to-case and junction-to-ambient, which bakes in the wrong boundary assumption. Temperature-dependent loss feedback is frequently omitted, which makes thermal derating look less necessary than it is.
Disciplined modelling means choosing a consistent loss basis, wiring it into a thermal network that matches packaging, and validating the full chain against temperatures you can measure. SPS SOFTWARE fits that discipline well when you need transparent, editable models that you can inspect, tune, and teach from, because clarity keeps teams aligned on what the numbers mean. Results that hold up over time come from tight assumptions and careful validation, not from extra complexity.
Digital testing confidence comes from validated models that set expected ranges, limits, and pass criteria before any hardware stress.
Pre-test insights are most useful when they prioritise operating corners and the minimum measurements needed to prove or disprove key assumptions.
Reliable hardware testing improves when teams treat model mismatches as structured feedback, then update parameters, limits, and test sequences with discipline.
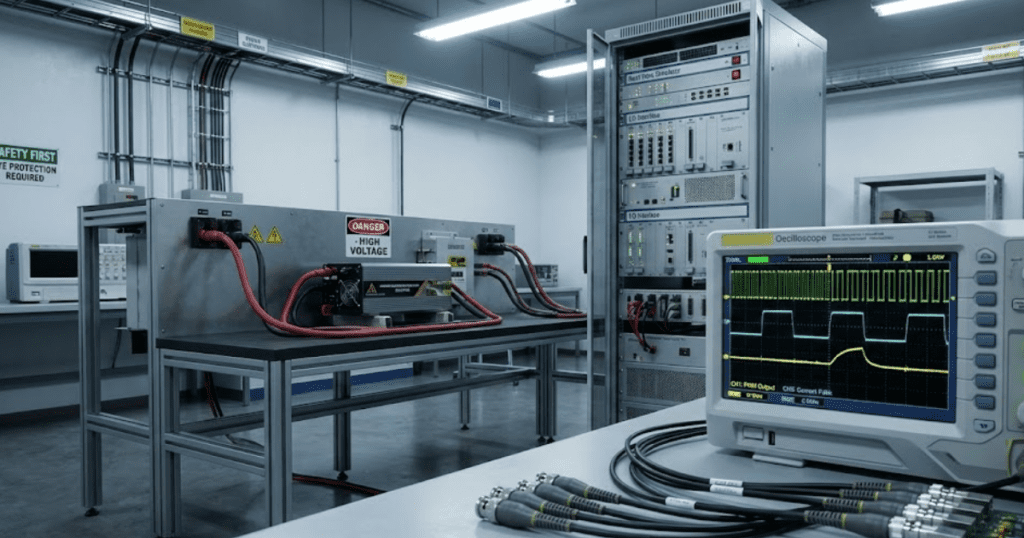
Hardware testing in power systems and power electronics fails when you treat first power-up as a discovery exercise. A model that matches your system’s physics turns testing into confirmation, because you arrive with expected waveforms, limits, and pass criteria instead of guesses. That matters because a single bad test can damage equipment, delay schedules, and put people at risk. Power interruptions alone cost the U.S. economy about $44 billion per year, and poor validation upstream is one way those costs show up downstream.
Digital testing confidence comes from disciplined model validation, not from running more simulations. Accurate models help predict behaviour because they capture the right structure, parameters, and control logic, then prove those assumptions against what you can measure. When you use modelling to get pre-test insights, you decide what to measure, what to limit, and what to try first, before any risky switching or fault work starts. The result is fewer surprises, cleaner test data, and faster root-cause work when results differ from expectations.
“Validated digital models make hardware tests more predictable and safer.”
Digital models set test expectations before hardware power-up
A digital model supports hardware testing when it defines expected signals and limits before you apply power. You use it to predict steady-state values, transient ranges, and protection thresholds. That gives you a baseline for judging anomalies during commissioning. It also reduces risk because you can pre-plan current, voltage, and thermal margins.
A practical case is a lab team preparing to commission a 250 kW grid-forming inverter feeding a small microgrid bus. The first simulation run uses the intended filter values, controller gains, and a range of grid impedances that could exist at the point of connection. You walk into the lab knowing the expected inrush, the settling time after a load step, and the waveform quality at the terminals. If the measured current spikes exceed the model’s upper bound, you stop and investigate the setup rather than pushing ahead.
Test expectations work best when they’re written down as checkable statements, not as plots you glance at once. You’ll also get more value if you treat the model as a contract between design, controls, and test teams, with a clear list of assumptions that can be challenged. That mindset keeps the model from becoming a “nice to have” file that nobody trusts under pressure. It also forces a system behaviour study to stay tied to measurements you can actually take in the lab.
Model output you should have
Checkpoint you set before first power-up
Why it makes testing more reliable
Expected steady-state voltages and currents at key nodes
Instrument ranges and alarm limits match predicted operating bands
You avoid saturating sensors and you spot abnormal conditions early
Step response to load changes and setpoint changes
Pass criteria include settling time and overshoot limits
You separate tuning issues from wiring and measurement errors
Protection pickup levels and trip timing assumptions
Trip thresholds are reviewed with the model as a reference
You reduce nuisance trips and avoid unsafe test escalation
Loss and thermal estimates under test profiles
Cooling checks and run durations align to predicted heating
You prevent damage during long sweeps or repeated transients
Sensitivity to uncertain parameters such as impedance and delay
Worst-case corners are prioritized in the test plan
You find weak points early instead of late and expensive retests
Pre-test studies find operating corners, limits, and needed measurements
Pre-test studies give you pre-test insights that shape what you test first and what you postpone. They identify operating corners where stability, protection, or thermal limits tighten. They also tell you which measurements will settle the biggest uncertainties. You gain confidence because your first hardware runs target the highest information value with the lowest risk.
That inverter commissioning case becomes manageable once the model sweeps the parameter ranges that you can’t know exactly on day one. You’ll see which combinations of grid impedance and controller gains create oscillations, and which ones stay well damped. You also learn where measurement quality matters, such as current sensor bandwidth during switching transients or voltage probe placement during fault tests. When the model flags a narrow stability margin, you plan smaller steps and shorter run times until the behaviour matches expectations.
Grid or load impedance corners that push damping and stability limits
Worst-case DC-link voltage and ripple under expected transients
Peak phase current and di/dt that set safe ramp rates
Protection coordination limits that affect trip timing and thresholds
Signals that must be logged at high resolution for root-cause work
These studies will only help if you treat the results as test inputs, not as design trivia. If a sweep shows that a 10% change in delay shifts stability, you will prioritise validating timing paths and sampling assumptions. If a sweep shows that impedance uncertainty dominates, you will plan a quick impedance characterization step before aggressive testing. The point is simple: pre-test work earns its keep when it reduces the number of “unknown unknowns” you carry into the lab.
Model validation methods that build confidence in digital test results
Model validation builds digital testing confidence when you prove structure and parameters against measurements you can trust. You validate in layers, starting with component checks and moving to subsystem behaviour. Each check tightens uncertainty and reduces the chance of matching data for the wrong reason. The goal is a model that fails loudly when assumptions are wrong.
Inadequate software testing has been estimated to cost $59.5 billion per year in the U.S. economy, and control-heavy power hardware suffers from the same pattern of late, expensive discovery. Your validation plan should include basic conservation checks, timing checks, and sensitivity checks before you compare complex waveforms. If the model predicts energy creation or loss that violates physics, it’s telling you something is structurally wrong. If small parameter changes cause large output swings, you learn where measurement effort will pay back.
Transparent models help here because you can inspect equations and assumptions instead of treating blocks as opaque. SPS SOFTWARE supports physics-based modelling with editable component detail, which matters during validation because you can trace results to parameters you can measure and defend. You’ll still need to manage fidelity choices, since switching detail, numerical step size, and controller timing can all shift outcomes. Validation is not about making plots line up once; it’s about showing the model stays honest across the operating band you plan to test.
Accurate models predict system behaviour under faults and control changes
Accurate models predict behaviour under faults and control changes because they capture interactions, not just steady-state points. Faults expose coupling among control loops, protection logic, and network impedance. Control changes expose timing, saturation, and limit handling. When those mechanisms are represented correctly, the model becomes a reliable way to anticipate failure modes before hardware sees them.
The inverter commissioning scenario is a good stress test for model fidelity because the “interesting” behaviour often happens during abnormal events. A voltage sag can push current limits and trigger control mode changes within a few cycles. A close-in fault can drive protection trips, then create a restart sequence with inrush and synchronization steps. If the model includes realistic limits, delays, and trip logic, you can predict which event sequences are safe to attempt and which ones require additional interlocks.
Prediction does not mean perfect matching of every oscillation. It means the model gets the dominant mechanism right and predicts the direction and magnitude of change when you vary a condition. You’ll also learn which parts of the design are robust and which rely on tuned settings that drift with hardware tolerances. That clarity supports better test sequencing, because you can keep early runs inside well-understood regions and expand outward with control over risk.
Turn model outputs into test sequences, safety checks, and criteria
Model outputs become useful in the lab when they translate into a test sequence with clear stop rules. You map predicted ranges to instrument settings, interlocks, and pass criteria. You also use the model to order tests from low-risk, high-information runs to higher-stress cases. This turns testing into a controlled comparison between predicted and measured behaviour.
In the inverter case, the sequence typically starts with low-voltage functional checks, then low-power synchronization, then incremental load steps, and only then controlled disturbance tests. The model tells you what “normal” looks like at each stage, so you can gate progress on clear criteria such as waveform distortion limits, current peaks, or temperature rise over a fixed duration. If the measured response differs, you pause at the smallest test that still reproduces the mismatch, because that isolates causes faster than jumping to a harsher run.
This is also where you decide what to log and at what resolution. A model that predicts the key state variables helps you avoid collecting a pile of signals that won’t answer the hard questions later. You’ll also decide which parameters you will identify from early data, then push back into the model to tighten later predictions. That loop is the practical bridge between modelling and safe hardware execution.
Common modelling mistakes that reduce trust during hardware testing
“Hardware testing becomes more reliable once the model earns its role as the reference, and once teams agree that mismatches are learning opportunities, not reasons to abandon the process.”
Trust breaks when a model hides assumptions, skips limits, or treats unknown parameters as fixed facts. It also breaks when the model is too detailed to validate, so nobody can explain why it matches. A reliable workflow keeps the model simple enough to defend and detailed enough to predict the test outcomes you care about. That balance is a management choice as much as a technical one.
The most common failure mode is validating against a single “good looking” waveform while ignoring sensitivity and uncertainty. Another is leaving out saturations, dead time, sampling delay, or protection latch behaviour, then acting surprised when hardware reacts sharply. Poor alignment between measurement points and model variables is also a quiet problem, because you end up comparing signals that are not truly equivalent. When those issues stack up, engineers stop using the model for pre-test insights and revert to guesswork under schedule pressure.
Disciplined execution fixes this, and it’s more important than any one tool. You’ll get better outcomes when you treat validation as a checklist of falsifiable claims, keep assumptions visible, and update parameters based on early measurements. SPS SOFTWARE fits well into that style because transparent, physics-based models are easier to challenge and refine when the lab data disagrees.
Research validity improves when model claims stay tied to measurable physics, so results remain stable across operating points and test conditions.
Model credibility grows when equations, parameters, units, and assumptions are transparent enough for peers to audit and reproduce without guesswork.
Academic confidence comes from disciplined verification, calibration, and validation, plus a deliberate choice of fidelity that matches the study’s claim.
Research validity lives or dies on one simple question: can someone else follow your assumptions and get the same system behaviour when they test it. A 2016 survey found 70% of researchers had tried and failed to reproduce another scientist’s experiments. That gap is rarely about effort alone. It often comes from models that hide assumptions, blur units, or rely on tuning that cannot be justified outside one dataset.
Physical modelling fixes that failure mode because it forces every claim to pass through conservation laws, component limits, and measurement definitions. You still need calibration and good data, but the model starts from constraints you can explain and audit. When you can point to the equation, the parameter source, and the test that anchors each behaviour, confidence stops being a feeling and becomes a traceable argument.
“Physical modelling improves research validity because your model’s claims stay tied to measurable physics.”
Physical modelling ties assumptions to measurable system physics
Physical modelling improves research validity when your assumptions are expressed as quantities you can measure, check, and reason about. Equations connect inputs to outputs through conservation of energy, charge, and momentum, plus component laws. Units must balance. Boundary conditions must be declared. Those constraints make silent guesswork harder to hide.
That constraint matters because it limits the number of ways a model can be “right for the wrong reason.” A curve-fit can match a plot while misunderstanding what causes the response. A physics-based model must represent the mechanism that produces the response, so later changes in operating point, topology, or control logic still follow the same rules. You get clearer limits on where the model is valid, not just a nicer match on one case.
Physical modelling also improves communication across roles. You can hand a model to a lab team, a reviewer, or a new student and talk in the shared language of parameters, tolerances, and test conditions. That lowers friction during peer review because the model becomes inspectable, not mysterious. It also makes gaps obvious, which is exactly what research credibility needs.
Research validity improves when model behaviour matches test evidence
Model credibility rises when simulated behaviour matches test evidence under clearly stated conditions. The match must cover the behaviours that matter to your claim, not only steady-state averages. Transients, saturation, switching effects, and control limits need attention when they affect outcomes. Validity improves when you can show how the same assumptions predict multiple measurements.
A concrete workflow looks like this: you build a physics-based model of a grid-tied inverter and its filter, then run the same load-step and setpoint-change sequences you run on a bench setup. Measured waveforms and simulated waveforms get compared using agreed metrics such as rise time, overshoot, and harmonic content, with the measurement bandwidth and sampling made explicit. When discrepancies appear, you adjust only parameters that have a physical meaning and a traceable basis.
This approach protects you from accidental confirmation. If a tweak improves one plot but breaks another, that failure is useful information about missing physics or wrong assumptions. The payoff is practical: reviewers see that the model is not only tuned to pass one test, it is structured to explain why behaviour happens. That is the link between system behaviour accuracy and research validity.
Model clarity builds academic confidence through transparent equations and parameters
Model clarity supports research credibility when every equation, parameter, and default is visible and easy to trace. Clarity means you can explain where each number comes from, what it represents physically, and how sensitive results are to it.
“Academic confidence follows because peers can audit your reasoning instead of trusting a black box.”
Clarity usually fails in small ways that add up. Hidden initial conditions, unnamed gains, and mixed units create “ghost tuning” that cannot be defended. A clear model uses consistent units, explicit reference frames, and readable blocks or code. Parameter sets stay separate from equations so a reviewer can see what is fundamental and what is specific to one setup.
Execution also matters. Platforms that keep component equations open and editable make it easier to document what you changed and why, which helps reproducibility when projects move across teams. SPS SOFTWARE supports this style of work through transparent component models you can inspect and adjust, which pushes modelling conversations back toward physics and away from unexplained magic numbers.
What reviewers can check quickly
What it does for research validity
Units and reference frames stay consistent end to end
Reduces hidden scaling errors that can mimic “good” results
Each parameter has a source and physical meaning
Makes tuning defensible and transferable across test setups
Assumptions and boundary conditions are written explicitly
Shows where results apply and where claims stop applying
Defaults and initial conditions are visible and justified
Prevents accidental bias from undocumented starting states
Sensitivity checks identify which parameters matter most
Focuses validation effort on the levers that change outcomes
Calibration and verification methods that raise model credibility
Model credibility improves when you separate verification from calibration and treat both as disciplined steps. Verification checks that equations are implemented correctly and numerics behave. Calibration adjusts physically meaningful parameters to match measurements. Validation then tests predictions on cases not used for calibration, which is where research validity becomes defensible.
Replication work shows why this discipline matters. A large replication effort reported that only 36% of replicated studies produced statistically significant results consistent with the originals. Physical modelling does not remove that risk on its own, but it reduces the surface area for untracked tuning because calibration can be constrained to parameters you can justify and measure.
Run verification tests that target conservation laws and limiting cases
Lock solver settings and document step sizes and tolerances
Calibrate only parameters with a physical interpretation and trace
Validate against measurements not used during calibration
Report uncertainty from sensors, sampling, and parameter tolerances
These steps also make your work easier to defend during review. Questions shift from “why should we trust your model” to “which assumptions control the result,” which is a better scientific conversation. It also helps your team maintain the model over time because changes can be tested against a known set of checks.
Common failure modes that reduce system behaviour accuracy
System behaviour accuracy drops when modelling shortcuts hide the true mechanism or when numerics distort the response. The most common failure is mixing physical modelling with unconstrained tuning until the model matches one plot but loses meaning. Another failure is leaving solver and initialization choices undocumented, which makes results fragile and hard to reproduce.
Parameter misuse is another quiet issue. A resistance or inductance pulled from a datasheet can be valid only for a specific frequency or temperature, and a controller gain can depend on sampling and delays that are not represented. Unit errors also persist longer than teams expect because the output still “looks reasonable.” Physical modelling helps, but only if you treat unit checks and boundary conditions as non-negotiable.
Measurement mismatch can also look like a modelling error. If the sensor bandwidth, filtering, or timestamp alignment differs between test and simulation, you will chase the wrong parameter. Credible research work treats the measurement chain as part of the comparison, not a footnote. That mindset keeps your calibration honest and your conclusions tighter.
How to choose fidelity and scope for credible studies
Credible studies pick a model fidelity that matches the claim you want to support, then prove that fidelity is sufficient with targeted checks. Fidelity is not a virtue on its own. A model that is too simple will miss limiting effects, but a model that is too detailed will hide assumptions, inflate tuning effort, and make verification harder.
Start with the output you need to trust, then work backward to the physics that controls it. If the claim depends on a transient limit, represent the dynamics that set that limit and keep other parts as simple as possible. If the claim depends on losses or thermal margins, focus detail where dissipation is computed and measured. This scope discipline also protects timelines, because you spend effort where it affects validity rather than spreading it across every component.
Academic confidence grows when you can say, plainly, “this model is detailed here because it changes the answer, and simplified here because it does not.” Tools that keep models transparent and editable support that discipline, and SPS SOFTWARE fits best when you want physics-based clarity without hiding equations behind closed blocks. The strongest research credibility comes from that habit of disciplined modelling, careful testing, and honest limits.
Start with baseline rectification and a buck stage so your waveforms pass simple, repeatable checks.
Add nonideal details one at a time so switch based models stay explainable and debuggable.
Select the next model by the behaviour you must explain and by time step limits, not by topology novelty.
Build seven starter converter models and you’ll stop guessing about switching behaviour. Ripple and modulation will turn into signals you can verify. We’ll review results against the same baseline set.
New engineers keep asking what converter models should engineers build first. We can answer that with simple circuits that validate fast.
How these converter models build practical modelling confidence
A focused set of converter types links circuit states to waveforms you measure. Start with switch based modelling so commutation and ripple are visible. Add averaged versions only after switching passes checks. That routine sharpens DC and DC/AC modelling without hiding mistakes behind control.
Freeze control at fixed duty ratio and validate energy flow first. SPS SOFTWARE helps when you need open, inspectable component models.
Keep a single probe list across all models and sweep one parameter at a time. Power balance and volt second checks will catch most errors early.
“Power balance and volt second checks will catch most errors early.”
7 converter models engineers should build first
These seven models follow a practical order. Each circuit adds one concept and needs a plotted validation signal. Build each once with ideal devices, then once with one nonideal detail.
1. Uncontrolled diode rectifier as the baseline DC source
An uncontrolled diode rectifier teaches commutation without control or gate logic. Model a single phase bridge feeding a DC capacitor and a resistive load. Plot diode current pulses and DC bus voltage, then verify ripple rises with load current. Add a small source inductance, watch overlap conduction stretch pulses, and lower the bus. Measure diode conduction angle and input current crest factor so you can spot unrealistic source models. Save the DC bus ripple plot for later comparisons. This rectifier becomes the DC link you’ll reuse for inverter and motor load tests.
2. Buck converter for duty cycle and ripple understanding
A buck converter is a clean starting point for dc dc modelling because the checks are direct. Use an ideal switch, diode, inductor, capacitor, and a resistive load with a fixed duty cycle. Confirm average output voltage tracks duty times input during continuous conduction. Sweep the switching frequency and confirm that the inductor ripple current drops as the frequency rises. Step the load and confirm the output settles with a transient set by L and C. People asking how do you model DC DC converters should start here, then reuse its probes on every new topology.
3. Boost converter for non-ideal switching behaviour
A boost converter makes nonideal switching visible because current transitions are sharp. Build the ideal circuit first, then add one detail such as diode reverse recovery. Plot switch current at turn on and compare it to inductor current, since a spike will appear once recovery is present. Plot switch voltage at turn off and confirm transient peak and ringing grow when you add stray inductance. Add a small RC snubber and confirm peak voltage drops while losses rise. This model also provides a quick test of time-step resolution at the switching frequency.
4. Buck boost converter to expose mode transitions
A buck boost converter exposes operating modes that break assumptions about polarity and conduction. Model the inverting buck boost with fixed duty and a resistive load, then track output voltage sign and inductor current. Sweep duty from 0.2 to 0.8 and verify the gain curve steepens as duty rises. Lighten the load until inductor current hits zero and discontinuous conduction appears. Compare measured gain in that mode to the continuous conduction estimate and note the mismatch. Mode detection should be based on state variables.
5. Isolated flyback converter for magnetics interaction
A flyback converter forces magnetics into your model because magnetizing inductance stores energy. Use a coupled inductor element with turns ratio, magnetizing inductance, and leakage inductance. Add a clamp so switch voltage stays bounded when leakage energy releases. Validate the primary current ramp during the on interval and the reset during the off interval. Check that magnetizing current returns to the expected level each cycle, which confirms reset is working. Plot magnetizing current peak so you can spot saturation risk. Increase leakage inductance and confirm the clamp absorbs energy.
6. Single phase voltage source inverter with ideal switches
A single phase voltage source inverter is a fast step into dc ac modelling because the switching function is easy to see. Model a full bridge on a stiff DC link and drive it with a basic PWM pattern. Run an RL load and plot output voltage, load current, and ripple near the switching frequency. Swap PWM for a square wave and compare RMS current and peak current. Add an LC output filter and confirm that switching ripple drops as phase lag increases. Teams asking how can teams set up basic dc ac models can start with this inverter plus an RL load.
“Build each once with ideal devices, then once with one nonideal detail.”
7. Three phase inverter with basic modulation and load dynamics
A three phase inverter teaches phase relationships, line to line voltages, and load dynamics in one model. Start with a balanced three phase RL load and sinusoidal modulation at a fixed modulation index. Validate balanced phase currents and confirm line to line voltages match the expected fundamental magnitude. Sweep the modulation index and confirm that the fundamental voltage scales linearly until saturation. Feed the DC link from your rectifier model and watch bus ripple print into phase voltages. Add a small load imbalance and confirm phase currents shift as expected.
Uncontrolled diode rectifier as the baseline dc source
It gives you a DC link with visible diode commutation.
Buck converter for duty cycle and ripple understanding
It teaches duty ratio and ripple checks you can trust.
Boost converter for non-ideal switching behaviour
It shows nonideal effects as stress at switching edges.
Buck boost converter to expose mode transitions
It forces you to detect operating modes from plotted states.
Isolated flyback converter for magnetics interaction
It links magnetics settings to current ramps and stress.
Single phase voltage source inverter with ideal switches
It turns DC into AC with simple modulation validation.
Three phase inverter with basic modulation and load dynamics
It ties modulation, loads, and DC bus ripple in one place.
How to choose which converter model to build next
Pick the next model based on the converter types you need to explain. Switching loss work requires switch-based modelling, while control tuning often works with an averaged power stage once waveforms are trusted. Time step limits and switching frequency set hard boundaries on model detail.
Start from the closest existing model and add one feature, such as dead time or a nonlinear load. SPS SOFTWARE fits well when you need editable models that students and senior engineers can read without translation.
Treat model building like a checklist sport. Clear probes and pass fail plots will keep reviews calm.
EMT precision is a timing problem first, so waveform checks must focus on early cycles and fast transients.
High detail modelling earns its cost only when it reproduces limits, logic states, and device interactions seen in recordings.
A small set of repeatable waveform checks will keep event recreation honest and reviewable.
Accurate event recreation lets you replay a disturbance and trust the cause you identify. Published estimates place the annual U.S. cost of power outages between $28 billion and $169 billion, so wrong findings cost real time and money. You can’t fix what you can’t explain. EMT precision turns waveforms into evidence.
EMT precision matters because disturbances live in timing, not averages. A replay that matches RMS values but misses the first cycles will point you at the wrong device or setting. High detail modelling adds effort, so it needs checks you can run and repeat. The goal stays simple: match the waveform parts your study will use.
EMT accuracy defines how closely simulations reproduce electrical events
EMT accuracy means your simulated voltage and current traces match measured waveforms on the same timeline. The match has to hold before the disturbance, during the first cycles, and through recovery. Phase, polarity, and sequence must line up, not just magnitude. If those checks fail, event recreation becomes unreliable.
A common case is replaying a feeder fault captured at a substation. You align pre fault loading, apply the fault at the recorded time, and compare the voltage dip depth against the recorder. You also check current peaks and their decay, since DC offset and saturation shape early cycles. The recovery shape matters too, such as a slow return linked to stalled motors.
Accuracy is a set of pass/fail checks tied to what you need to decide next. Protection studies care about the first cycles because pickup and trip logic live there. Control studies care about the next few hundred milliseconds where limiters and synchronizing logic settle. Treat accuracy as a checklist, and your disturbance reproduction stays repeatable. It also keeps debates focused on measurable gaps.
“EMT precision turns waveforms into evidence.”
Precise event recreation depends on capturing fast switching and transients
Precise event recreation depends on capturing the fast physics that shape the first milliseconds. EMT precision comes from modelling switching, conduction states, saturation, and line effects at a time step that can resolve them. Some inverter connected generator models run with time steps as low as 1–2 µs, which shows how quickly key dynamics move. Coarser steps will blur peaks and shift event timing.
Capacitor bank switching is a clear illustration. The recorder often shows a voltage spike and bus ringing, not a clean step. Matching that ringing needs correct capacitor and reactor values, realistic upstream impedance, and a switch model that represents the closing instant. Small timing error will move the peak enough to break the match.
Transformer energization, breaker pole timing, and cable energization also create short bursts that set initial conditions. A replay can look close after 200 ms, yet internal controller states will already be wrong. Treat the first milliseconds as a gate check. That habit prevents long, late-night tuning sessions.
High detail modelling reveals disturbance behavior hidden by averaged models
High detail modelling reveals behavior that averaged models hide when limits and nonlinearities dominate. EMT will show current clipping, phase jumps, harmonic injection, and brief control mode switches that are smoothed out in averaged representations. Those details decide if equipment rides through, trips, or recovers cleanly. If the disturbance reproduction needs that decision, you need EMT detail.
An inverter ride through event during a close in fault shows the difference fast. An averaged model can hold current proportional to voltage and recover smoothly once voltage returns. A detailed EMT model will show current limiting, mode switching, and a short oscillation as synchronizing logic re locks. That short window can explain either a second protection pickup or a negative-sequence current spike.
Detail also exposes interaction between devices. Two converters can look stable in isolation and still fight through a weak network, producing repeated limiter hits after clearing. With EMT detail, you can test fixes you can actually implement, such as adjusting a current limit ramp. Without it, you’ll tune a model to match a story, not the event.
Accurate EMT results improve fault analysis and protection coordination studies
Accurate EMT results improve fault analysis because protection responds to waveform features rather than just RMS values. Relays react to peaks, DC offset, harmonic content, and phase angle shifts. If the replay captures those features, you can test settings changes with confidence. If it does not, you will tune protection to a waveform that never occurred.
A feeder relay that mis operated during a temporary fault and reclose is a practical example. The recorder shows fault current, then transformer inrush after reclose, plus a voltage sag that lasted long enough to trip an undervoltage element. An EMT recreation can separate those contributors at the same bus, including converter current limits that deepen the sag for a few cycles. Once timing is clear, you can adjust delays, pickups, or blocking logic in line with the record.
Coordination also depends on consistency across cases. If the model matches one fault record but fails on a second event elsewhere, topology or equivalents are wrong. EMT makes that gap obvious because it won’t hide timing errors behind averages. That clarity speeds up root cause work. It also reduces risky “trial and error” tuning.
Event replay quality shapes confidence in post incident engineering findings
Replay quality shapes what you will believe after an incident, because familiar looking waveforms feel convincing. A plausible but wrong replay will steer you toward the wrong cause and corrective action. A disciplined replay forces hard questions early, such as breaker status, event time stamps, and controller revision. That discipline turns event recreation into a reliable engineering tool.
A plant trip during a voltage dip shows why. Measured voltage returns, yet the plant stays offline and the operator log shows a latch. A low detail model can’t latch because internal state logic is missing, so the replay suggests the plant should have stayed online. A precise EMT replay that includes latch and reset conditions will reproduce the lockout and show the threshold crossing that triggered it.
The confidence bar should match the consequence of the finding. If the outcome warrants a retrofit, a settings change, or a compliance filing, the replay must stand up to review. Clear assumptions and repeatable waveform checks make that possible. Strong replay quality shortens debate and keeps focus on fixes.
“EMT makes that gap obvious because it won’t hide timing errors behind averages.”
Engineers should prioritize EMT detail based on disturbance study objectives
Better results come from prioritizing EMT detail around the disturbance you need to explain. Start with the signals that must match, then keep explicit models for the devices that shape those signals. Reduce everything else only when the reduction preserves transient response at your observation points. This focus controls model size and keeps run time under control.
A breaker operation at one bus needs detailed switching and nearby network impedance, not full detail everywhere. A corridor interaction between two converter plants needs detailed controls at both ends and enough network detail to preserve coupling. Teams using SPS SOFTWARE often formalize this workflow: define waveform checks, add detail until checks pass, then stop. That habit keeps modelling effort traceable, and it makes peer review simpler.
Study objective
Waveform checks to pass
Detail that usually matters
Relay pickup timing
Early cycles current and voltage
Saturation and DC offset
Converter ride through
Current limit and recovery
Control mode switching
Switching surge
Peak voltage and ringing
Switch and line detail
Fault location
Dip depth and phase shift
Topology and impedance
Lockout replay
Threshold crossings
Logic and timers
Common modelling shortcuts that reduce event recreation fidelity
Event recreation fails most often because small shortcuts stack up until timing no longer matches the record. The plots can still look smooth, so the error hides until pickup or latch behavior shows up in the field and not in the simulation. You avoid most failures by treating each shortcut as a hypothesis with a check. If the check fails, the shortcut goes.
Five shortcuts cause repeat problems in disturbance reproduction:
Using a time step too large for switching or saturation
Replacing controls with fixed current sources or gains
Omitting transformer saturation, inrush, or frequency effects
Ignoring event timing details such as pole scatter and delays
Forcing initial conditions that don’t match pre fault flows
Each shortcut breaks a different part of the replay, and the fix is clear once you see the mismatch. A too large time step will shift peaks and pickup times. Missing logic will erase latches and resets that operators see in logs. Teams that keep non negotiable waveform checks will stay honest over time. SPS SOFTWARE fits naturally when you need transparent, editable models you can inspect as carefully as you inspect the recordings.
Model consistency improves when shared parameters, data, and assumptions are explicitly documented.
Parameter alignment stays stable when ownership, naming, units, and shared reference data are enforced early.
A clean model handoff remains repeatable when assumptions and parameter changes are validated and recorded at every boundary.
Model consistency will improve when integration work treats models like interfaces, not just files. A single mismatch in units, defaults, or assumptions will turn into hours of rework. Defects follow. Clean handoffs will feel boring, and that’s the point.
Parameter alignment and data clarity come from making intent explicit before anyone starts “fixing” numbers. Integration teams sit between experts and owners. Your job is to standardize what gets owned, what gets checked, and what must be traceable. That discipline prevents surprises during model handoff.
Why model consistency breaks down during integration work
Model consistency breaks when teams exchange models without a shared contract for parameters, data, and assumptions. People patch mismatches locally, and those patches become silent forks. The model still runs, but outputs drift. Nobody knows which value is authoritative. Confusion spreads fast.
A model handoff from a controls group to a network group exposes this. One side assumes per-unit base values, the other uses absolute units, and the same conversion is applied twice. Plots look stable. Current limits and protection thresholds are now wrong, so debugging starts in the wrong place.
Fixing this takes more than asking for cleaner files. You need a set of practices that catch mismatches before they become local workarounds. We’ll get better results by policing interfaces and traceability, not by polishing every block. Rework drops when the contract is clear.
“The model still runs, but outputs drift.”
5 practices integration teams use to keep models consistent
Model consistency comes from repeatable constraints that make mismatches visible early. Each practice targets a different failure mode: ownership gaps, unit drift, copied data, hidden assumptions, and unreviewed edits. When you apply all five parameters, parameter alignment becomes routine rather than late-stage firefighting.
Start with the practices that touch the most shared surfaces: ownership, naming, and units. Add central reference data and handoff validation next. Leave review checkpoints for last so they stay short.
1. Define shared parameter ownership before models move between teams
Shared parameters need an owner, a scope, and an edit rule, or they will drift the moment two teams touch them. Ownership is not about control; it sets who approves changes and who gets notified. One simple ownership map will prevent conflicting defaults and duplicate “master” copies. The owner also maintains default values and a short public change log.
A handoff often involves repeating settings such as base frequency, nominal voltage, or controller gains. One team tweaks a gain to pass a test, another team later “fixes” a different copy, and results split. Assigning a single owner ensures a single source and a clear review path for shared parameters. Keep ownership limited to values that cross boundaries or affect acceptance checks.
2. Lock naming conventions and units before integration begins
Naming and units are the quickest ways to lose data clarity, because small inconsistencies can hide in almost-the-same variables. A locked convention makes mismatches obvious and stops translation work that wastes expert time. Unit rules also prevent errors that look like physics problems when they’re really bookkeeping.
A common integration bug occurs when a parameter called Vbase in one model and V_nom in another has different units, like kV versus V. Someone connects the models, sees values that look reasonable, and moves on. A required unit tag and a naming pattern will flag the mismatch before you trust plots. Keep the convention small: name, unit, reference frame, and sign. If a value is unitless, it must be stated as such in writing.
3. Centralize reference data instead of copying parameters downstream
Copied reference data creates silent forks, because teams adjust copies to fit local tests. Centralizing shared data keeps parameter alignment stable and lets you track changes without chasing spreadsheets. Data clarity improves when every model points to the same dataset and the same version.
Store network base values, device ratings, and test profiles in a single editable reference that models read at build time. If a feeder impedance gets updated after a field review, the change lands once and dependent models update on the next run. Teams working in SPS SOFTWARE often keep that reference versioned and inspectable, so edits stay visible and reproducible. Keep engineering truth separate from temporary tuning, using a local override layer that never writes back.
4. Validate assumptions at every model handoff point
Assumptions will leak across teams unless you check them during the handoff itself. A handoff validation step confirms initial conditions, solver settings, saturation limits, and signal scaling before deeper tests begin. That keeps model consistency tied to intent, not just identical numbers.
One group might start from steady initial states, another starts from zero and ramps up. Both are valid, but mixing them creates false failures that burn days. A short checklist that includes start-up mode, sampling rate, and limiters will catch this early. Pair it with a small acceptance run that produces a known signature, like expected RMS values and expected protection triggers. Record these assumptions in a handoff note attached to the model package every time.
“A required unit tag and a naming pattern will flag the mismatch before you trust plots.”
5. Track parameter changes with lightweight review checkpoints
Parameter alignment is not a one-time task; it is a stream of edits across weeks of work. Lightweight review checkpoints stop silent drift without adding heavy gates. The goal is visible intent, so future handoffs don’t depend on someone’s memory. Shared means anything that affects interface signals, scaling, ratings, or acceptance plots.
Set a checkpoint any time shared parameters change: what changed, why it changed, and what tests were rerun. A short sign-off from the owning team prevents quick fixes that break later integration. The change note also answers “when did this start?” in minutes instead of hours. If you can’t explain the change in one sentence, the checkpoint blocks it until you can. Keep checkpoints asynchronous and focused solely on shared interfaces.
Define shared parameter ownership before models move between teams
Assigning clear ownership prevents multiple teams from silently changing the same parameter in different ways.
Lock naming conventions and units before integration begins
Consistent names and units make mismatches visible early, rather than hiding errors within valid-looking values.
Centralize reference data instead of copying parameters downstream
Using a single shared source for reference data prevents forked values from drifting as teams tune models locally.
Validate assumptions at every model handoff point
Explicitly checking startup conditions, limits, and scaling ensures results reflect intent rather than setup differences.
Track parameter changes with lightweight review checkpoints
Simple change reviews keep shared parameters traceable so fixes do not introduce new integration problems later.
Applying these practices across handoffs and integration stages
Clean model handoff is a workflow, not a template. Start with ownership and units, then central reference data, then handoff validation and reviews. You’ll know it’s working when discussions shift from “which number is right” to “which assumption is intended.” Results become predictable.
Roll this out one boundary at a time. Pick a shared interface, define shared parameters, and run the same acceptance check after every handoff for two weeks. Add the change checkpoint only after the basics stick, or reviews turn into arguments. The sequence matters because clarity has to come first.
Long-term consistency comes from keeping shared models teachable and inspectable. SPS SOFTWARE works best when the team treats parameters and assumptions as part of the model, rather than as hidden notes. That discipline makes the next integration calmer and easier to debug. New people join and ask hard questions.
Model quality stays high when purpose, evidence, and repeatability stay aligned.
An evaluation scorecard turns review criteria into consistent scoring and clearer feedback.
Shared criteria between students and educators will make grading fairer and habits stronger.
You will judge model quality faster and more fairly when you score it against clear criteria, not a gut feel. Formative feedback cycles show measurable gains; one synthesis reported a mean effect size of 0.32. The same pattern shows up in engineering labs, since repeated checks beat one big grade. Consistent evaluation will turn modelling from guesswork into a habit you can defend.
Model quality is not about packing the most blocks into a diagram. Quality means your model will answer the question it claims to answer, with results you can explain and repeat. Students improve faster when evaluation looks like a small test plan with logged evidence. Educators grade with less noise when the same evidence is visible to everyone.
What students mean when they evaluate model quality
Students evaluate model quality when deciding whether a model is fit for its stated purpose. The check includes correctness, clarity, and repeatability, not just a clean plot. A model is high-quality when another person can run it and get the same result. A model is considered low-quality when its results depend on hidden tweaks or missing context.
A microgrid lab model exposes this fast. One student tunes a voltage sag response until the waveform looks right, then forgets to state the source impedance used. A lab partner runs the same file and sees a different sag depth, but cannot reconcile the mismatch. Quality drops because the model’s story is not repeatable.
Good evaluation starts with a plain question: what will this model support, and what will it not support. “Runs without errors” is a low bar for engineering work. A model that runs can still violate units, sign conventions, or energy balance. Evaluation shifts the focus from “did it run” to “did it prove anything.”
The core criteria students use to judge model quality
Most student reviews map to a small set of review criteria that work across courses. Accuracy matters, but it must tie to a reference you can defend. Consistency checks matter because they catch mistakes without extra data. Transparency matters because a hidden assumption will break peer review and grading.
An RLC step response assignment makes the criteria concrete. A strong model matches the expected damping ratio, maintains unit consistency, and shows the source of initial conditions. A weak model matches the plot only after random parameter edits, then hides those edits inside subsystems. The same criteria still apply to feeders, converters, and protection logic models.
We trust a model when we can trace each result back to evidence. Accuracy without traceability will not earn trust, since no one can see why the match occurred. Traceability without accuracy also fails, since the model will not answer the task. Quality stays strong when you balance criteria and match the grader’s focus.
“Evaluation shifts the focus from “did it run” to “did it prove anything.”
How students build an evaluation scorecard that stays consistent
An evaluation scorecard turns model review into repeatable scoring. You define criteria, tie each to evidence, and score the same way each time. Consistency beats clever weighting, since graders trust repeatable checks. Self checks speed up when evidence is clear.
Disagreement drops when the scorecard requires evidence. One published study reported an overall inter rater reliability ICC of 0.7 when evaluators scored the same work with a shared rubric. Students can mirror this by anchoring each score level to an artifact, not a feeling.
Aspect being checked
What strong model quality looks like
What weak model quality looks like
Purpose alignment
The model answers a clearly stated question and stays focused on that task from start to finish.
The model includes extra behavior that does not support the stated task or distracts from it.
Assumptions visibility
All simplifying assumptions are written down and their impact on results is explained.
Assumptions are implied or hidden, making results hard to interpret or trust.
Evidence for correctness
Results are supported by reference checks, sanity tests, or expected physical behavior.
Results rely only on visual agreement or tuning without justification.
Repeatability of results
Another person can run the model and reproduce the same outputs using the same inputs.
Results change when someone else runs the model or when files are reopened.
Transparency of parameters
Key parameters, units, and initial conditions are easy to locate and understand.
Important values are buried in subsystems or lack units and context.
Review readiness
The model includes notes or artifacts that support grading and peer review.
The model requires verbal explanation because supporting evidence is missing.
Transparent models make scorecards easier to apply, since you can point to equations and parameters. SPS SOFTWARE supports this style when labs need inspectable models for review. Clarity cuts debate and regrading. Feedback gets sharper because each gap maps to one row.
The sequence students follow when reviewing a technical model
A good review order saves time because early checks catch the biggest errors. Start with purpose and scope, then check the structure and run simple sanity tests, then judge the results. The order stops you from tuning a broken model. Notes become easier to follow for peers and educators.
Confirm the purpose, inputs, and expected outputs
Check topology and signs against the reference schematic
Run sanity checks on units, limits, and initial states
Compare key results to an analytic check or baseline run
Record tests run and evidence collected
A lab partner reviewing a converter model can apply these steps in minutes. The reviewer confirms the switching frequency and control targets, then checks the power-stage wiring. A no load run should keep current near zero and voltages in range. Only then should the reviewer judge efficiency or waveform shape.
Later tests assume earlier checks are correct. Controller tuning before sensor scaling checks will waste hours and still result in a failing grade. The sequence reduces bias in peer assessment, since everyone follows the same path. Educators grade faster when the student assessment steps align with the grader’s workflow.
How assumptions and scope shape student quality assessments
Assumptions and scope define what “correct” will mean for your model. A model can be excellent inside its scope and useless outside it. Students who write scope clearly avoid unfair criticism, since reviewers know what was intentionally left out. Educators reward clear scope because it shows engineering judgment.
A power electronics task that targets control-loop stability illustrates the trade-off. An averaged converter model will cleanly answer the stability question, while a switching model will bury it under ripple and step-size noise. The averaging assumption is valid when you state frequency separation and explain why ripple is not the metric. Quality rises because the model matches the task.
Scope also changes what tests you should run. An EMT level network study will need checks on time step, solver limits, and numerical stability, while a steady state RMS study will need checks on balance and phasor assumptions. Students lose points when they test the wrong thing, then claim the model is “validated.” Clear scope keeps tests aligned with what the model claims to represent.
Common errors students make when scoring model quality
Students often score models based on output shape rather than evidence. That habit rewards tuned models and punishes models that document their work. Another error is mixing critique of the idea with critique of the implementation. Quality scoring should focus on what the model proves, not what you wish it proved.
A classic failure occurs when a single nominal waveform match ends the review. The model passes the nominal case but fails under a small change, such as a load step or a shift in fault impedance. Another failure shows up when time steps are chosen for speed, which distorts dynamics and hides instabilities. Review criteria that include repeatability and sensitivity checks will catch both issues.
Self assessment also fails when documentation gets skipped because the model is “obvious.” Missing units, initial states, or parameter sources will block grading and peer review. Students also lose points when a value changes without a note, so the final model has no audit trail. A scorecard forces discipline, since each row needs a specific artifact.
“The closing judgment is simple: disciplined evaluation is part of engineering, not extra paperwork.”
How educators align feedback with student assessment criteria
Educators grade student models best when feedback points to the same evidence students used for scoring. Clear criteria reduce arguments about style and focus attention on what the model will support. Alignment also means educators will show what “good” looks like in the same format used for grading. Students learn faster when feedback turns into the next test you should run.
Calibration before grading keeps scores consistent across sections. Two graders score the same sample model, compare notes, and adjust scorecard wording until scores match. Students can mirror this during peer review by swapping models and scoring them independently, then discussing one mismatch at a time. The result is fairer grading and stronger habits.
The closing judgment is simple: disciplined evaluation is part of engineering, not extra paperwork. Students who treat review criteria as a test plan will build models that teach as they run. Educators who align comments with the scorecard will spend less time defending grades and more time coaching. SPS SOFTWARE supports this approach when labs want transparent, inspectable models that make evidence easy to show.